RoboDK API
这个例子展示了如何使用UR机器人创建一个新的工作站,并用机器人模拟一个六边形的运动。
1.选择文件➔![]() 开放
开放
2.打开UR10机器人
3.选择文件➔![]() 开放
开放
4.打开Paint_gun.tool文件
5.打开样例Python程序SampleOfflineProgramming.py从C: / RoboDK /图书馆/宏/
6.双击SampleOfflineProgramming项来运行模拟。机器人应该在机器人当前位置周围画一个六边形,TCP的轨迹将以黄色显示。
或者,右键单击程序并选择![]() 运行Python脚本。
运行Python脚本。
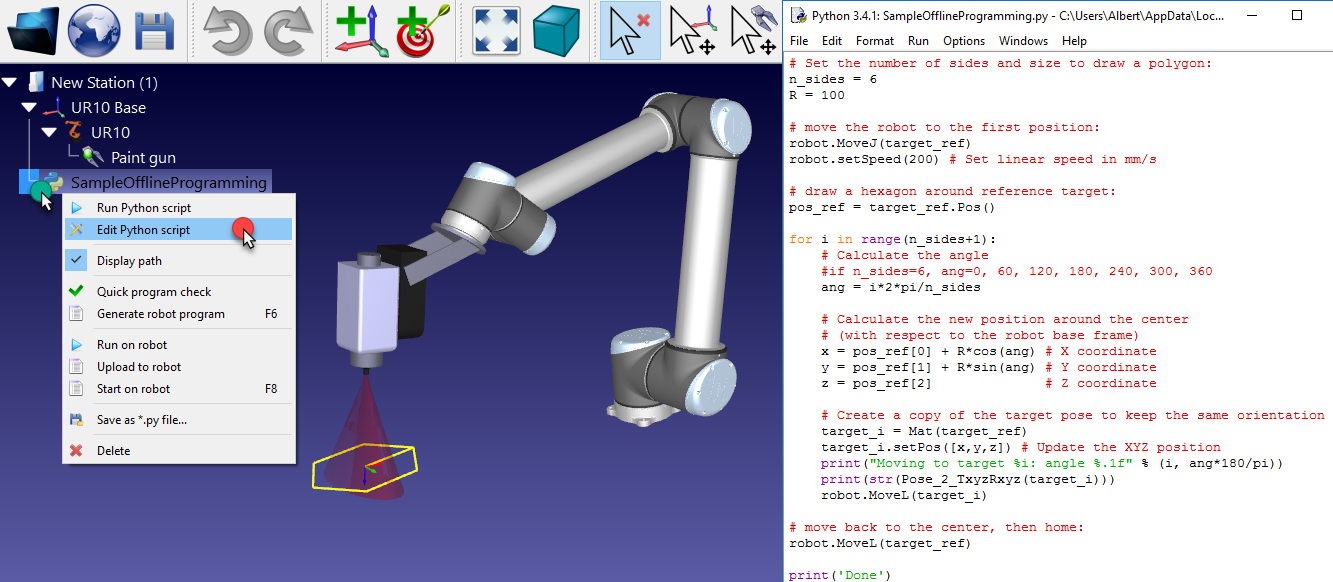
7.右键单击![]() SampleOfflineProgramming项目和选择编辑Python脚本。我们应该看到如下图所示的程序。
SampleOfflineProgramming项目和选择编辑Python脚本。我们应该看到如下图所示的程序。
SampleOfflineProgramming宏将绘制一个边多边形n_sides和半径R在机器人的当前位置,相对于机器人参照系。如果需要,将机器人移动到不同的位置,改变多边形尺寸并重新运行程序。
中显示的程序类似于此示例2022世界杯8强赛时间网站的一部分(包括视频)。