RoboDK API
Python是一种广泛使用的用于通用编程的高级编程语言。Python是一种编程语言,可以让您更快地工作并更有效地集成系统。与其他语言相比,Python的语法允许程序员用更少的代码行来表达概念,使其友好且易于学习。
的前一节解释了将RoboDK API与广泛使用的机器人编程语言(如Python)一起使用的优点。
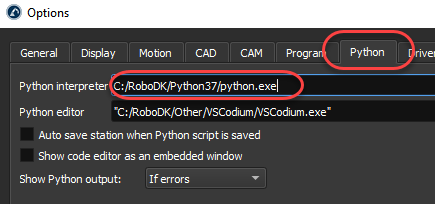
Python默认自动安装并集成到RoboDK中。选择工具➔选项➔其他更改默认设置(Python位置和Python编辑器)。

的Python的RoboDK API分为以下几个模块:
·的robodk包是Python API的分布式入口点。它是所有子包和模块的共同父包。
·的robolinksub-module (robolink.py)是RoboDK和Python之间的接口。RoboDK站树中的任何对象都可以使用Robolink对象来检索,它由项对象。可以根据Robolink对该项目执行不同的操作。项目类。
·的robomathsub-module (robomath.py)是一个Python机器人工具箱,允许操作姿势转换,并获得不同机器人供应商的欧拉角。所有后置处理器都依赖于这个模块。
·的robodialogssub-module (robodialogs.py)是一个对话框工具箱。例如,打开和保存文件对话框、消息提示等。
·的robofileiosub-module (robofileio.py)是一个文件操作工具箱。文件属性,CSV, FTP等。
·的roboappssub-module (roboapps.py)是一个RoboDK应用工具箱。更多有关应用程式的资料,请参阅此处:AppLoader。
您可以在C:/RoboDK/Python/文件夹中找到Python模块。当您在RoboDK中运行Python程序和后处理器时,默认情况下会自动包含该文件夹(用作PYTHONPATH)。
下面的小节分别展示了如何创建一个简单的程序来进行模拟、离线编程和在线编程。2022世界杯8强赛时间中提供了更多示例RoboDK的Python API页面。此外,RoboDK库在脚本和宏文件夹中附带了示例Python脚本,可在默认库(C:/RoboDK/ library /)中获得。
这个例子展示了如何使用UR机器人创建一个新的工作站,并用机器人模拟一个六边形的运动。
1.选择文件➔![]() 开放
开放
2.打开UR10机器人
3.选择文件➔![]() 开放
开放
4.打开Paint_gun.tool文件
5.打开样例Python程序SampleOfflineProgramming.py从C: / RoboDK /图书馆/宏/
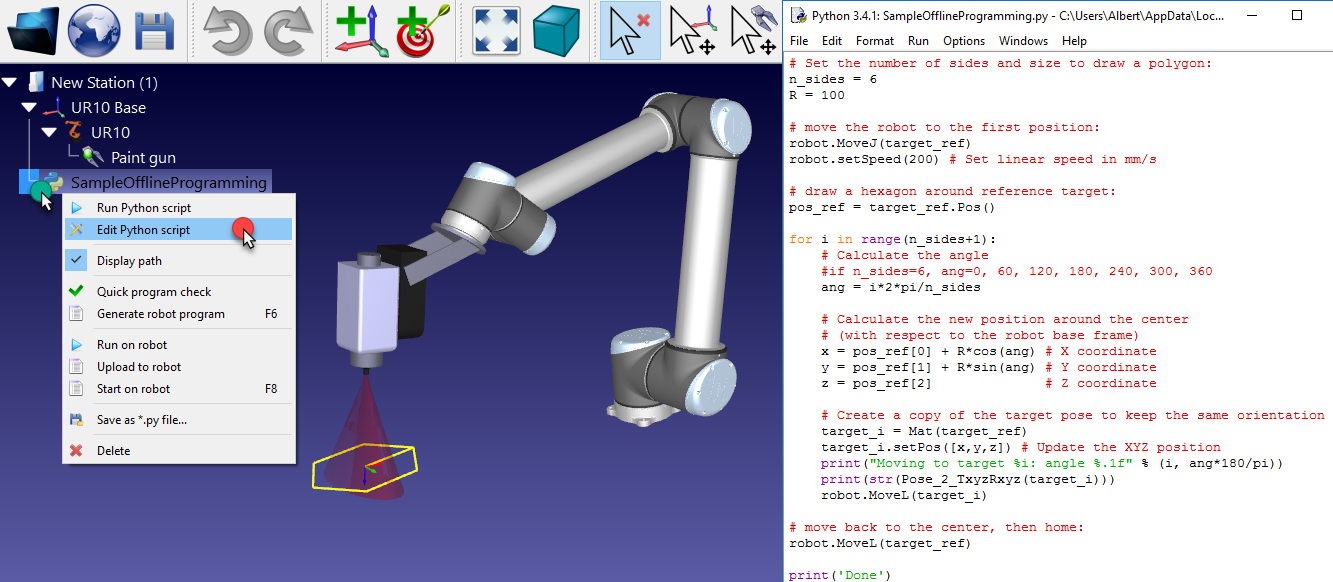
6.双击SampleOfflineProgramming项来运行模拟。机器人应该在机器人当前位置周围画一个六边形,TCP的轨迹将以黄色显示。
或者,右键单击程序并选择![]() 运行Python脚本。
运行Python脚本。
7.右键单击![]() SampleOfflineProgramming项目和选择编辑Python脚本。我们应该看到如下图所示的程序。
SampleOfflineProgramming项目和选择编辑Python脚本。我们应该看到如下图所示的程序。
SampleOfflineProgramming宏将绘制一个边多边形n_sides和半径R在机器人的当前位置,相对于机器人参照系。如果需要,将机器人移动到不同的位置,改变多边形尺寸并重新运行程序。
中显示的程序类似于此示例2022世界杯8强赛时间网站的一部分(包括视频)。
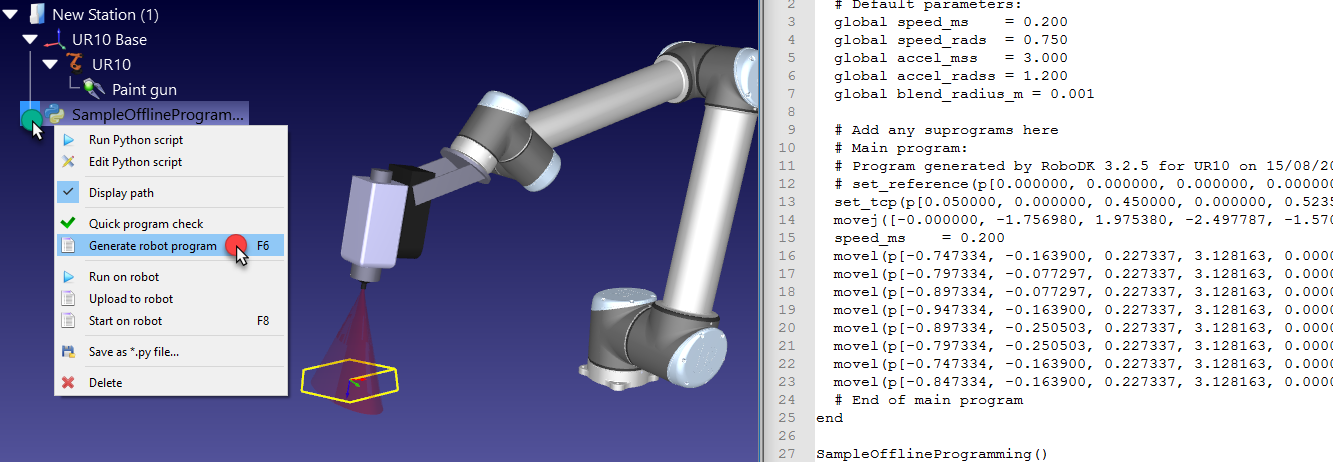
可以使用与模拟机器人相同的Python代码脱机生成Python程序(如前面所示)Python模拟部分)。2022世界杯8强赛时间离线编程允许生成可以在特定机器人控制器上执行的机器人程序:
1.右键单击a![]() Python程序
Python程序
2.选择生成机器人程序(F6)
在这种情况下,程序不是模拟的,而是快速执行以获得结果:特定于机器人控制器的机器人程序。
RDK = Robolink()
RDK.setRunMode (RUNMODE_MAKE_ROBOTPROG)
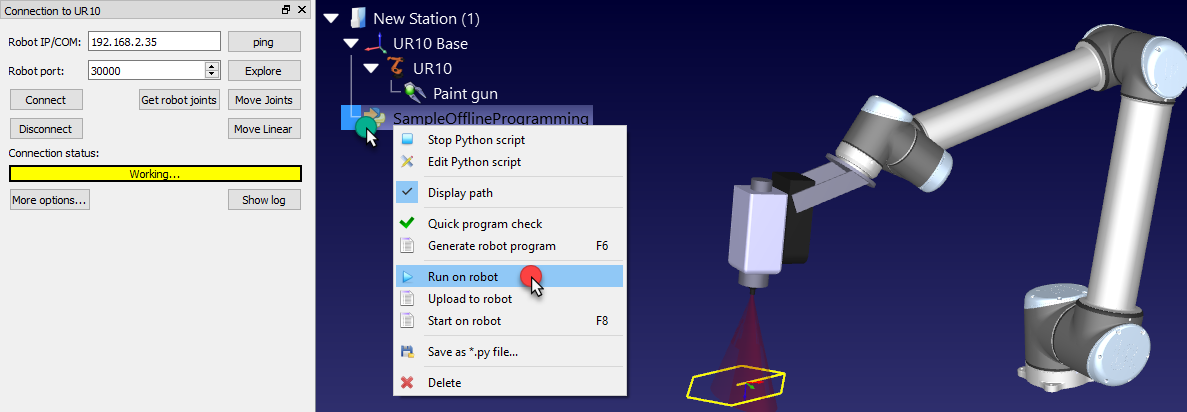
Python程序可以直接在机器人上执行,使用与模拟机器人相同的Python代码(如Python模拟部分)。在线编程允许在使用机器人驱动程序的特定机器人控制器上运行通用程序:
1.右键单击a![]() Python程序
Python程序
2.选择在机器人上运行
当Python程序执行时,该程序将在机器人上运行。
RDK = Robolink()
RDK.setRunMode (RUNMODE_RUN_ROBOT)
如果安装Python后再安装RoboDK,可能会导致RoboDK无法正常运行Python脚本或生成程序。本节展示了在RoboDK中正确设置Python解释器并运行Python脚本时应该遵循的步骤。
如果您看到如下错误消息,您应该遵循以下步骤:"在Tools-Options-Python中设置Python解释器的路径"或" Failed to run Python script "。在“Tools-Options-Python”选项卡中设置Python解释器的路径。
如果您已经安装了Python,请遵循以下步骤正确设置Python解释器路径:
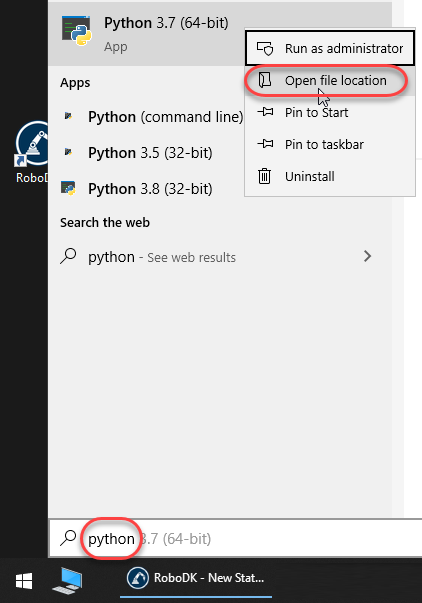
1.在Windows上选择开始菜单并键入python。
2.右键单击您想与RoboDK一起使用的Python版本并选择打开文件位置。
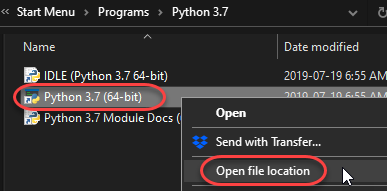
对打开的文件夹重复此步骤:
3.右键单击Python 3.7并选择打开文件位置。
4.在路径标题栏中选择路径上的“复制”。
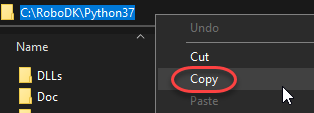
在RoboDK设置中提供Python路径:
5.RoboDK开放。
6.选择Tools-Options。
7.选择Python选项卡。
8.将路径粘贴到Python解释器盒子添加/ python.exe,如下图所示。使用正斜杠或反斜杠应该都有效。