RoboDK API
RoboDK的Matlab API可在RoboDK安装文件夹中获得,并附有一些示例(C:/RoboDK/Matlab/)。Matlab的RoboDK API是作为一组m文件提供的。
Matlab是一种专有的编程语言MathWorks。除此之外,MATLAB还允许矩阵操作、函数和数据的绘图以及算法的实现。
的主要部分本文档解释了将RoboDK API与广泛使用的编程语言(如Matlab)一起用于机器人编程的优点。
用于Matlab的RoboDK API包括:
·Robolink。m是一个与RoboDK接口的类。RoboDK Station Tree中的任何对象都可以使用Robolink对象进行检索,并由RobolinkItem对象表示(和Python一样Robolink类)。
·RobolinkItem。m是一个类,表示站树中的RoboDK项目。可以对该项执行不同的操作(与Python的Robolink。项类)。
·transl。米,rotx。米,roty。M和rotz。m是在给定XYZ平移向量或沿特定轴旋转的情况下创建姿态矩阵的函数。
·Pose_2_XYZRPW。m和xyzrpw__pose。m允许转换姿势到XYZ位置和RPW欧拉角,反之亦然。更多资料请参阅参考帧部分。
下面的页面提供了示例代码:
//www.sinclairbody.com/Matlab-API
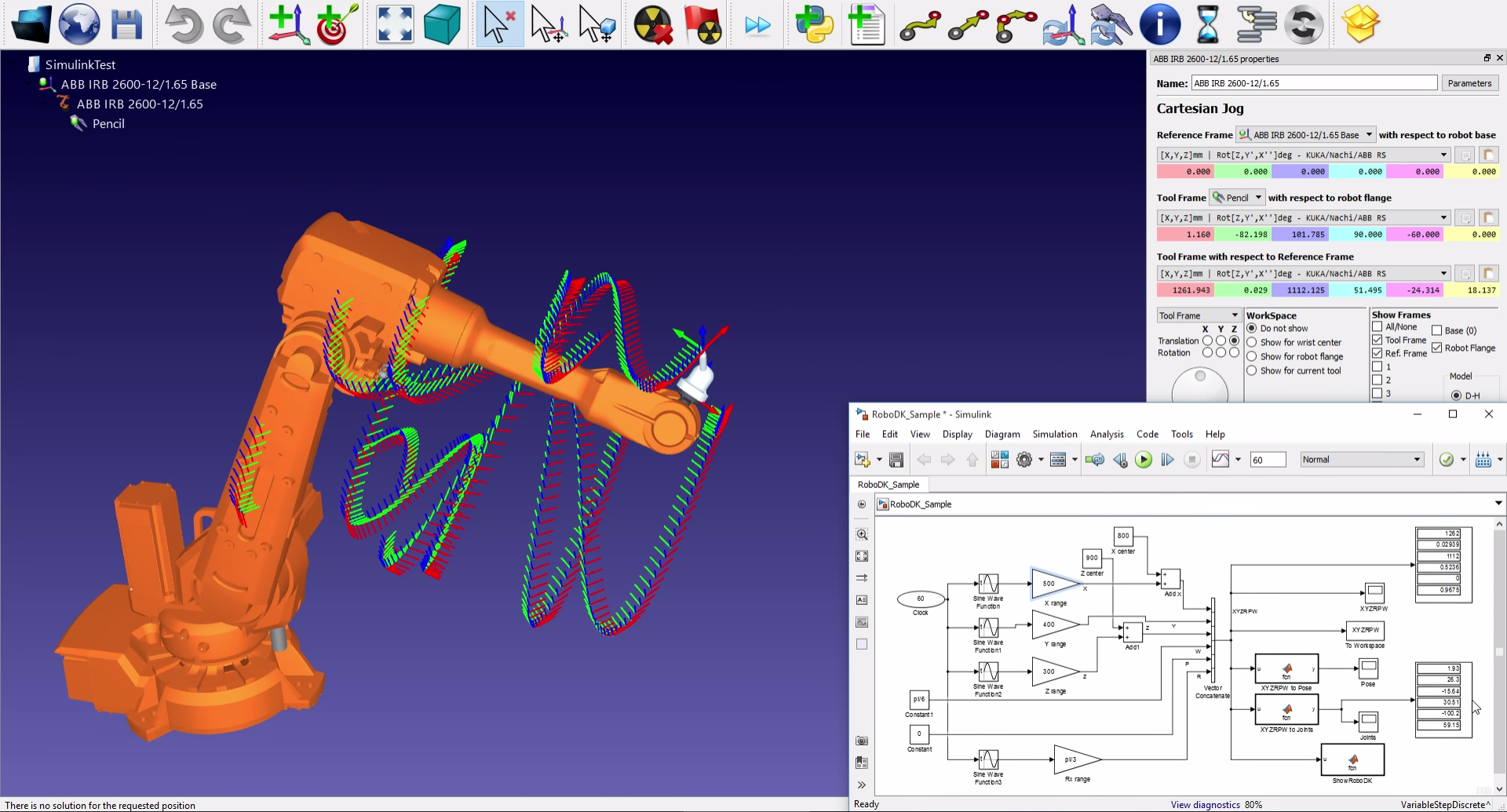
提供一个Simulink项目作为示例。在仿真中,机器人沿着一组任意生成的XYZ坐标移动。
下面的视频显示了运行模拟的结果:
https://www.youtube.com/watch?v=7DDBMwa0-Oc