RoboDK API
c#的RoboDK API是一个RoboDK.cs源文件,其中包含RoboDK类(类似于Python的)Robolink类),RoboDK。项class (similar to Python’sRobolink。项类API),以及其他机器人工具,例如用于矩阵操作的矩阵类(RoboDK.Mat),用于操作姿态转换。
c#(发音为“C sharp”)是一种由微软开发的编程语言,旨在构建各种运行在。net框架上的应用程序。c#简单、强大、类型安全、面向对象。的主要部分本文档解释了将RoboDK API与广泛使用的编程语言(如c#)一起用于机器人编程的优点。
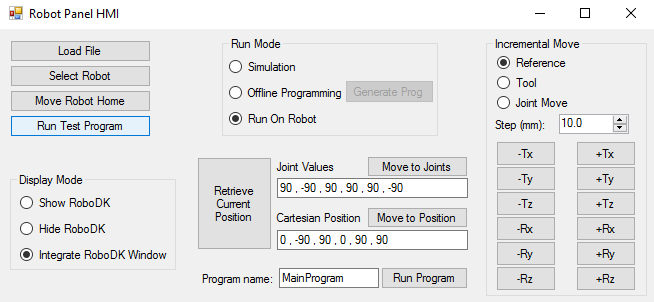
c#的RoboDK API提供了一个示例项目,如下图所示(包含完整的源代码)。也可以将它作为NuGet包来集成到任何。net项目中。
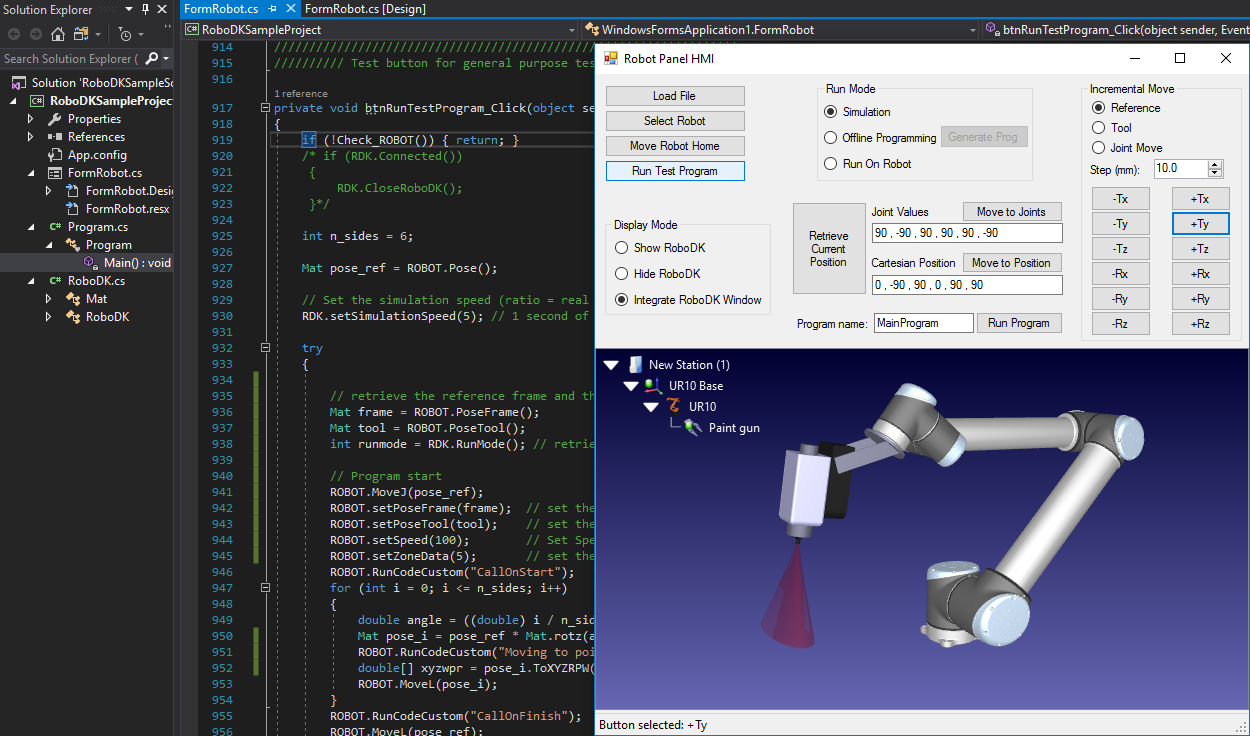
选择加载文件打开RoboDK站或RoboDK支持的任何其他文件。如果加载了机器人,robot变量将相应地更新(与使用选择机器人).
当使用机器人命令(如MoveJ, MoveL或setDO)时,c#程序默认是模拟的。当示例c#项目启动时,也默认选择模拟模式。
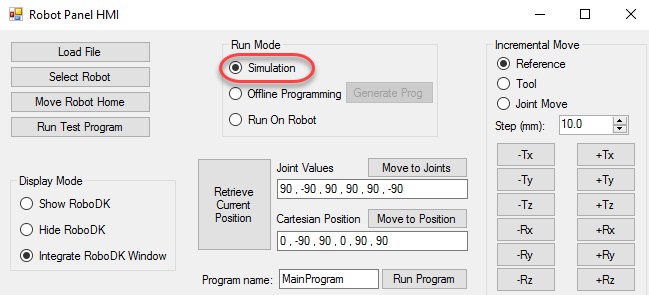
这意味着机器人的动作将在RoboDK中模拟。例如,我们可以通过选择右侧的按钮(+Tx, -Tx,…)移动机器人10毫米的步长,或者我们可以选择运行测试程序来围绕机器人的当前位置运行六边形运动。
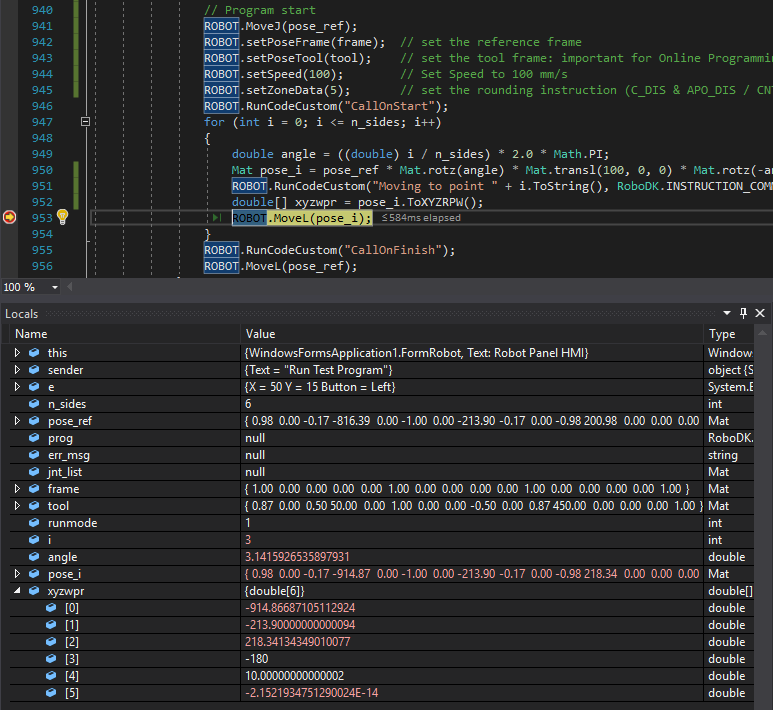
设置任何断点来调试应用程序并检查机器人目标。机器人目标可以定义为关节坐标或Mat变量(4x4姿态矩阵),并且它们可以作为XYZWPR格式进行检查以排除程序问题。中有关参考系的更多信息参考帧部分。
也可以将运行模式更改为2022世界杯8强赛时间或在线编程(在Robot上运行),如下部分所示。
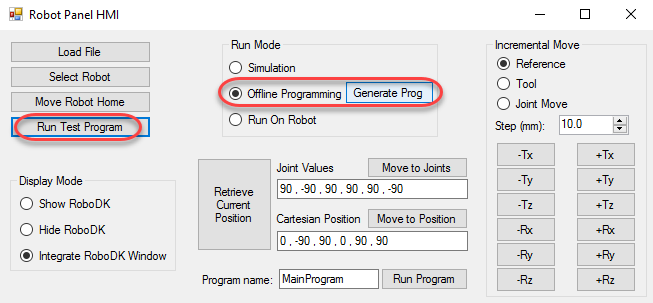
c#程序可以使用与模拟机器人相同的c#代码离线生成(离线编程)。2022世界杯8强赛时间按照以下步骤测试此功能:
1.选择2022世界杯8强赛时间在运行模式部分中
2.选择运行测试程序或者任何其他的动作组合
3.选择生成掠夺获取厂商特定的机器人程序
在这种情况下,程序不是模拟的,而是快速执行以获得结果:特定于机器人控制器的机器人程序。一旦程序生成,运行模式将更改回模拟模式。
c#程序可以直接在机器人上执行,使用与模拟相同的c#代码。在线编程允许在使用机器人驱动程序的特定机器人控制器上运行通用程序。按照以下步骤使用c#示例项目测试此功能:
1.选择在机器人上运行在运行模式部分中
2.选择将使机器人移动的任何其他命令
这些运动将在真实的机器人上运行,模拟器将与机器人同步运动。
RDK = Robolink();
RDK.setRunMode (RUNMODE_RUN_ROBOT);