后处理器
本节将向您展示如何对现有的后处理程序进行小的更改。大多数后置处理器都有一些变量,可以很容易地修改这些变量来改变或激活特定于供应商的机器人编程功能。
例如,将对现有的库卡和ABB后处理程序进行以下更改:
·生成一个程序,将其子程序作为一个文件,并强制程序每个程序最多有3000行代码。大程序将分成小程序,按顺序调用。
·设置一个关节运动以使用关节角度信息生成运动命令。
·覆盖最大速度500mm /s。即使机器人被编程为移动更快,在后处理器中速度也将被限制在500毫米/秒。
以下各节将展示如何在文本编辑器上进行建议的更改。
这个示例将向您展示如何更改KUKA KRC4后置处理器的默认行为,以在同一文件中生成主程序及其子程序。
确保后置处理编辑器启用插件并按照以下步骤进行后处理器修改:
1.选择程序➔后处理编辑器。
2.选择您想要定制的后置处理器(KUKA KRC4)。
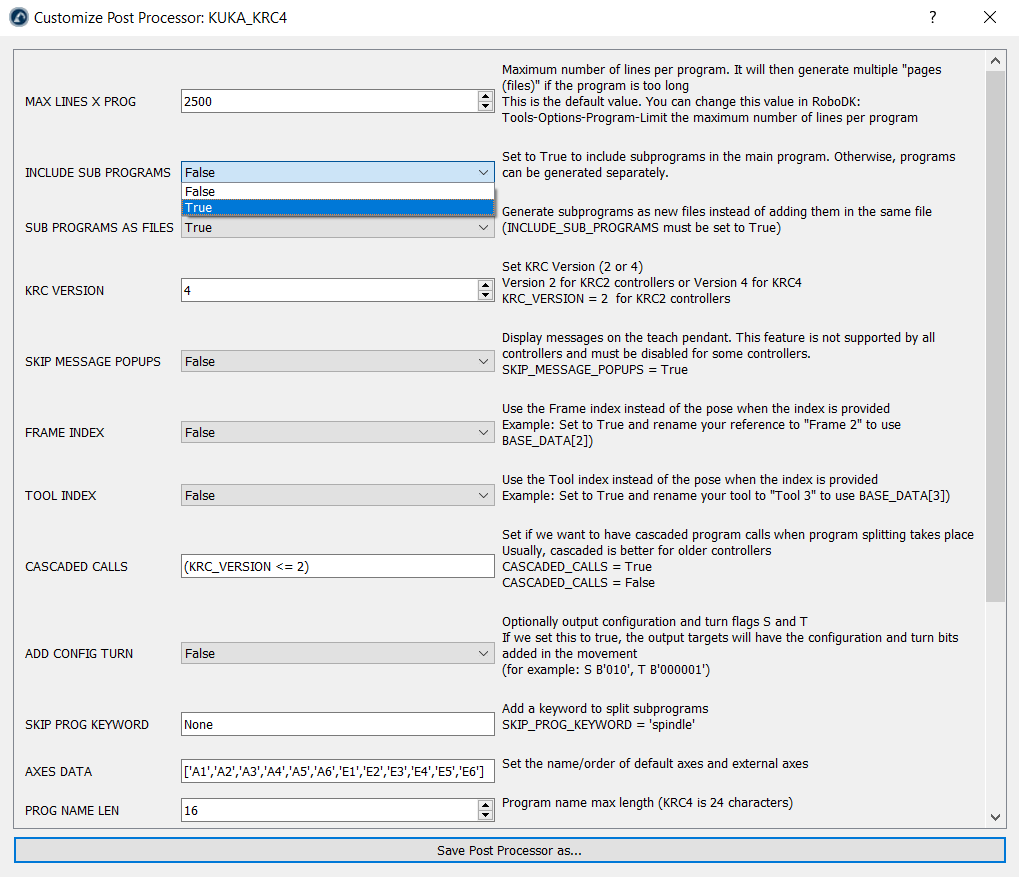
3.选择好吧.将打开一个新窗口,您将看到可以修改的变量,如下图所示。
4.设置包括子项目变量设置为True而不是False。
5.选择保存后处理器为…
6.输入一个新名称保存它(默认名称使用修改日期)。
现在你应该在RoboDK的Posts文件夹中有一个新的后置处理器。你现在可以按照以下步骤更新你的项目来使用这个新的后置处理器:
1.右键单击您的机器人。
2.选择选择后处理程序。
3.选择您创建的新后置处理器。
4.再次生成程序以查看结果。
您也可以使用文本编辑器进行这些更改。按照以下步骤更改后置处理器的默认Python代码:
1.选择程序➔添加/编辑后处理器
2.选择后处理程序。例如,对于KUKA KRC4选择KUKA_KRC4.
3.选择好吧.后置处理器将显示在文本编辑器中。
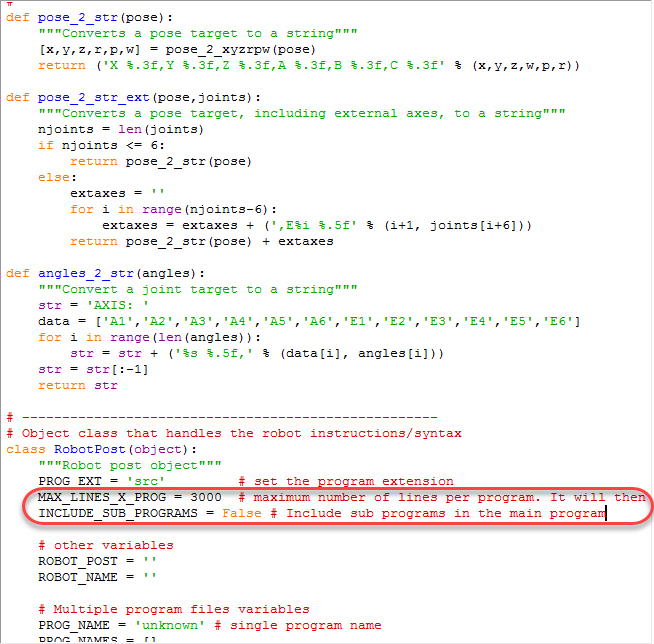
4.设置变量MAX_LINES_X_PROG到3000年。
5.设置变量INCLUDE_SUB_PROGRAMS为True。
这个示例将向您展示如何在使用RoboDK生成程序时施加500mm /s的速度限制并避免使用更高的速度。
在这个例子中,我们假设我们使用的是KUKA KRC2或KRC4控制器:
1.选择程序➔添加/编辑后处理器
2.选择后处理程序。例如,对于KUKA KRC4选择KUKA_KRC4.
3.选择好吧.后置处理器将显示在文本编辑器中。
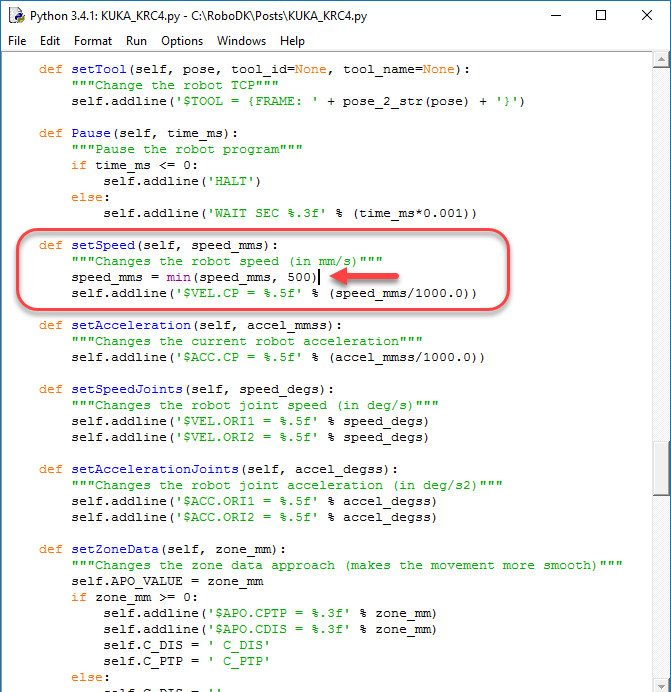
4.定位setSpeed函数定义(def setSpeed)
5.添加以下线路,使最大速度500mm /s。需要在生成$VEL之前添加该行。以m/s为单位改变速度的CP输出:
speed_mm = min(speed_mm, 500)
本节将向您展示如何修改现有的后处理器,以使用关节值而不是笛卡尔值强制轴向移动。
在本例中,我们将对ABB IRC5机器人控制器应用此更改。
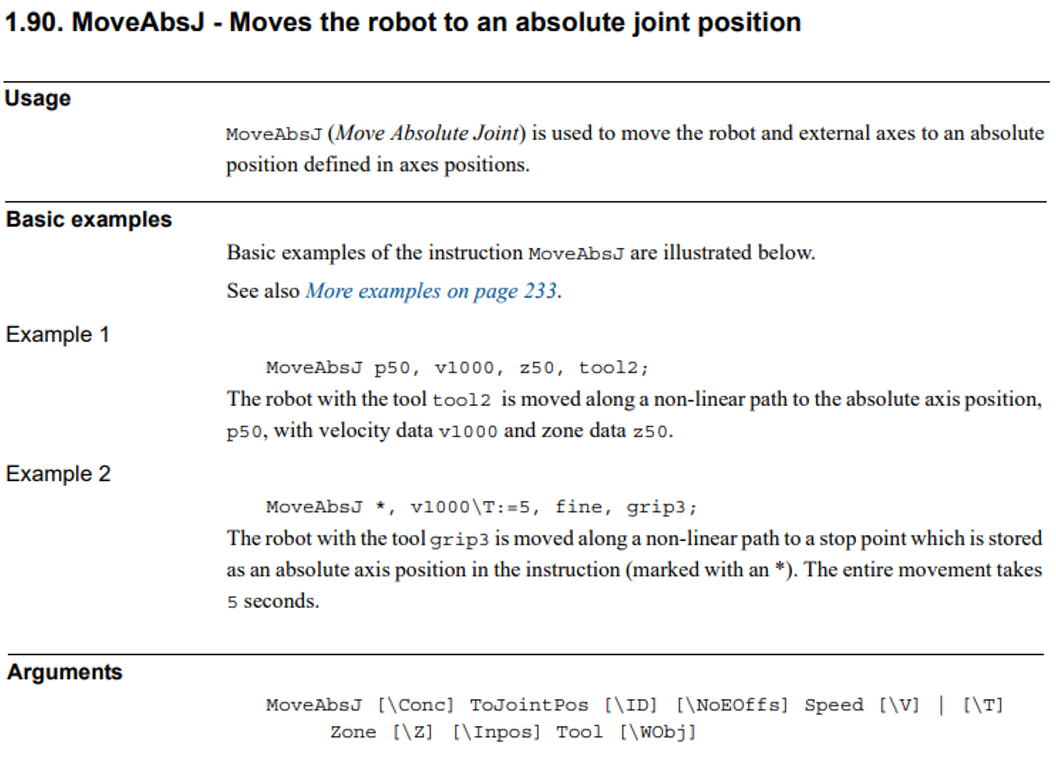
1.找到你的机器人控制器的编程手册。在这个例子中,我们使用ABB IRC5快速编程手册。
2.查看关节运动说明。在这种情况下,ABB的绝对联合运动命令被调用MoveAbsJ.此命令需要jointtarget定义关节轴的变量。
3.选择程序➔添加/编辑后处理器然后选择当前使用的后置处理器来修改它。如果您当前使用的是可自定义的后置处理器,则默认选中该后置处理器。
4.你应该找MoveJ后置处理器内部的函数。这个函数定义了后置处理器生成关节运动命令的方式。另外,RoboDK使用MoveL对于线性运动。使用Python编程语言修改添加到程序文件中的行,以提供关节角度信息,如下图所示。

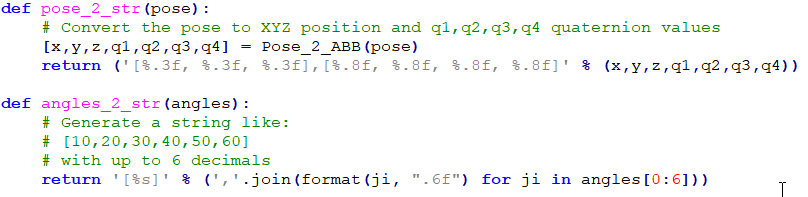
5.最后,您可能需要修改后处理程序将关节角度或姿势转换为字符串的方式。的函数angles_2_str和pose_2_str定义关节角度和姿态如何分别转换为文本。
大多数RoboDK后置处理器对关节运动使用关节数据,对线性运动使用笛卡尔坐标。建议始终将线性运动序列中的第一个点作为关节运动开始,并指定关节坐标。这避免了用错误的机器人配置启动程序并达到奇点或轴极限。