BobCAD-CAM的RoboDK插件
当你打开BobCAD-CAM软件时,你应该看到一个RoboDK工具栏。选择RoboDK选项卡,查看在RoboDK中设置机器人加工项目的可用选项。
的机器人安装![]() 按钮打开RoboDK,打开一个默认的机器人加工项目,可以用来启动你的机器人仿真和机器人加工项目。
按钮打开RoboDK,打开一个默认的机器人加工项目,可以用来启动你的机器人仿真和机器人加工项目。
你可以很容易地改变机器人,修改工具和/或参考框架。例如,按照以下步骤来更改机器人:
1.右键点击机器人
2.选择更换机器人(如图所示)
3.选择新的机器人
RoboDK安装程序默认只提供了一些机器人,但是,可以从2022世界杯国家队名单2022世界杯南美区预选赛 .
有关添加机器人工具的更多信息,请参见2022世界杯32强赛程表时间 .
持有Alt + Shift移动机器人工具(TCP)。这有助于在教授目标之前设置机器人的姿势。
通过选择保存项目以保存更改文件➔保存工作站(Ctrl+S).
选择更新操作按钮,将加工刀具路径从BobCAD-CAM软件发送到RoboDK。这将覆盖任何具有相同名称的现有机器人加工项目。
如果程序对所选机器人可行,则会显示绿色的复选标记。如果有任何问题(如奇点、轴限或延伸问题),将显示一个红色标记和问题的消息。
双击机器人加工项目![]() 打开特定于某一操作的机器人加工设置。有关机器人加工设置的更多信息,请参阅机器人加工部分.
打开特定于某一操作的机器人加工设置。有关机器人加工设置的更多信息,请参阅机器人加工部分.
右键单击一个程序并选择运行要模拟它(或双击程序)。您也可以选择生成机器人程序(F6)获取需要加载到机器人控制器上的机器人程序。关于如何生成机器人程序的更多信息,请参见2022世界杯8强赛时间离线编程部分.
如果需要,右键单击一个程序并选择选择后处理器更改后处理器。这一步可以帮助您自定义生成代码的外观。关于选择和自定义后处理器的更多信息,请参见后处理器部分.
一旦你的RoboDK工作站准备就绪,你可以直接从BobCAD-CAM软件生成机器人程序。为此,请选择生成程序.该选项将根据BobCAD-CAM项目中定义的加工刀具路径更新机器人程序。
在RoboDK中按照以下步骤查看或修改机器人程序的位置:
1.选择Tools-Options
2.选择程序选项卡
3.选择集在机器人程序文件夹
选择设置按钮,打开BobCAD-CAM的RoboDK插件相关设置。
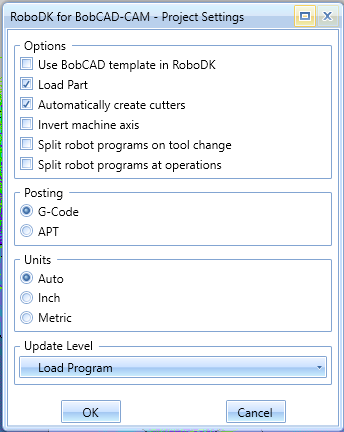
除其他外,您可以修改以下选项:
1.使用BobCAD-CAM模板代替RoboDK模板(RoboDK中的3D导航和颜色模板将匹配BobCAD-CAM风格)。
2.每次发布一个新的加工操作时,加载并更新RoboDK中的零件。只有可见的固体和表面将被加载。
3.检查选项倒立机床轴允许你自动说明你的工具Z轴指向内部的工具(而不是指向外部)。
4.使用G-Code文件代替APT文件。RoboDK可以读取以下文件,生成机器人仿真和程序:
一个。恰当的files(默认选项):在RoboDK中加载BobCAD-CAM原生APT文件。这是大多数操作的首选方法。
b。刀位点文件:生成g代码加工文件。注意,这种格式取决于您选择的后处理器,它主要设计用于3轴加工刀具路径。