开始
您可以使用脚本自定义您的模拟。RoboDK API允许您根据需要定制模拟。RoboDK集成了Python,通过使用示例脚本或使用RoboDK API,您可以改进模拟的结果。
默认情况下,RoboDK安装Python和一组示例脚本,允许您改进模拟。这包括模拟喷枪、模拟2D摄像机、将SVG文件转换为机器人程序、自动设置给定僵局的TCP、使用Python编程机器人、模拟离散事件等。也可以使用其他编程语言,如c#, c++或Matlab。更多信息可在RoboDK API部分.
在本例中,我们将添加一个现有的示例脚本,该脚本将模拟油漆枪的行为。您还可以用透明的颜色(通过选择工具➔改变颜色工具- Shift+T)或用适当的颜色加载现有模型(可从本地库作为paint_gun.tool或在线图书馆,注意设置工具指令可能需要更新链接到新工具)。
1.选择文件➔![]() 开放打开一个新的Python脚本(py文件)。
开放打开一个新的Python脚本(py文件)。
2.导航到C:/RoboDK/Library/Macros/查看一些示例宏。
3.选择SprayOn.
4.选择开放。一个新的Python对象![]() 将被添加。这个宏允许模拟粒子沉积,模拟喷雾体积。
将被添加。这个宏允许模拟粒子沉积,模拟喷雾体积。
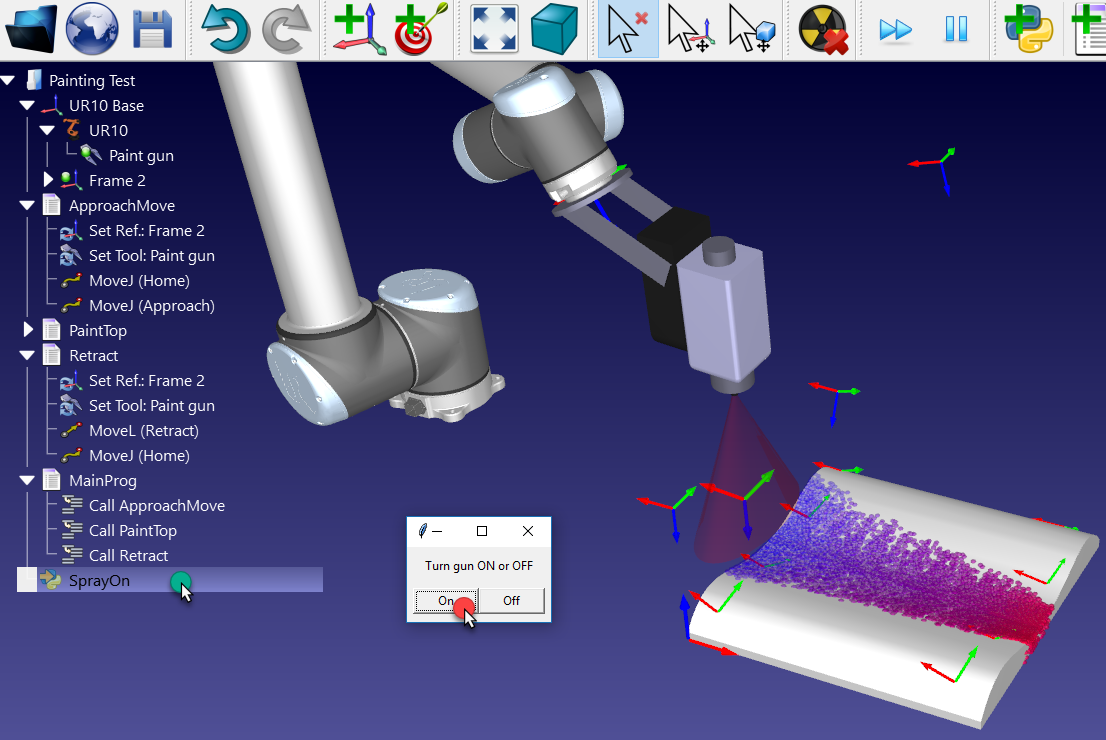
5.双击SprayOn宏来测试它。
6.选择在来激活它。
7.按住Alt键,拖动机器人法兰,用喷漆枪沿表面移动机器人。
你应该能看到油漆枪的痕迹。颜色和透明度应该根据TCP距离表面的远近而变化。
选择Esc一次,清除模拟油漆。
8.双击相同的SprayOn程序并选择从关闭粒子模拟。
为了更好地理解幕后发生的事情,可以通过以下方式查看或编辑Python代码:
1.右击![]() SprayOn.
SprayOn.
2.选择Python脚本编辑.
一个新的窗口(文本编辑器)将出现,显示建模喷雾行为的代码,以及Python如何与RoboDK集成。
为了在主程序中考虑喷雾模拟,我们可以遵循以下步骤:
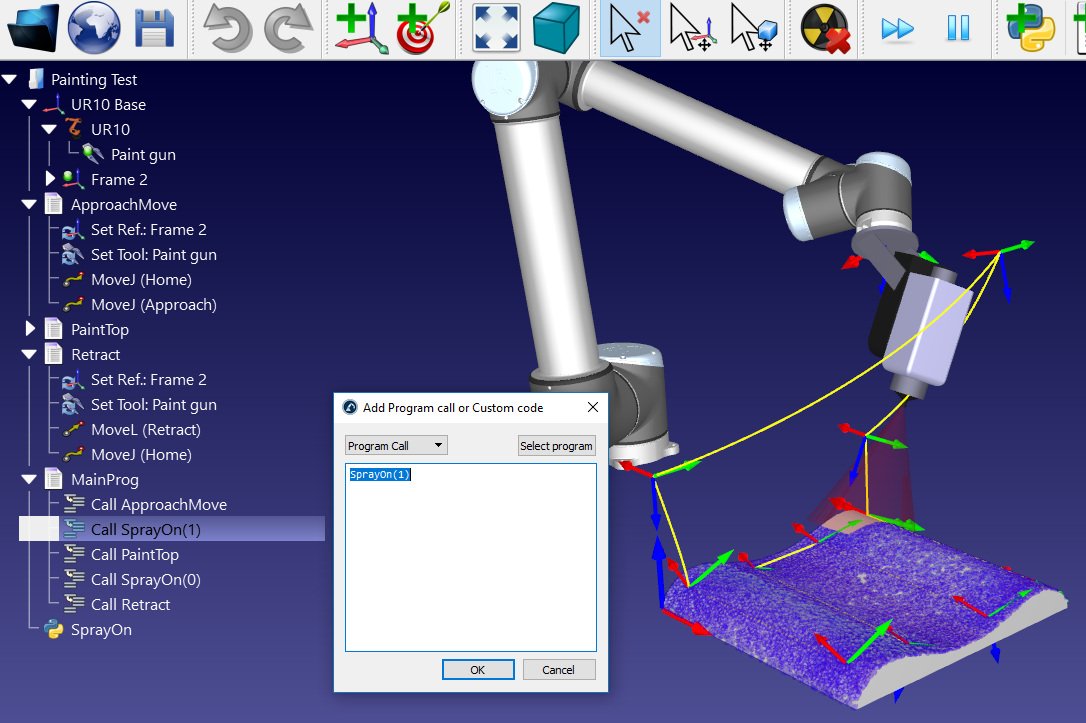
1.右键单击指令叫ApproachMove.
2.选择加法指令➔![]() 程序调用指令,在第一个程序调用后将添加一条新指令,并弹出一个新窗口。
程序调用指令,在第一个程序调用后将添加一条新指令,并弹出一个新窗口。
3.输入SprayOn(1)。
4.选择OK。
5.之后重复相同的操作PaintTop程序设置SprayOn (0),如下图所示。
如果有必要,可以通过在程序中拖放指令来重新排序。
6.运行MainProg程序。经过两次迭代之后,结果应该如图所示(在正常速度下模拟)。
也可以创建新的宏:
1.选择程序➔![]() 添加Python程序。
添加Python程序。
2.右键单击新程序并选择编辑Python脚本。
RoboDK支持在程序内设置机器人速度、设置数字输出、等待数字输入、显示消息等。这些说明可在程序菜单。