RoboDK支持大多数标准3D格式,如STL, STEP(或STP)和IGES(或IGS)格式。其他格式,如WRML, 3DS或OBJ也支持(STEP和IGES不支持Mac和Linux版本)。
按照以下步骤加载一个新的3D文件:
1.选择文件➔![入门-图15]() 开放
开放
2.选择对象检查对象可在RoboDK的默认库:
C: / RoboDK /图书馆/检查对象.
3.或者,拖放文件到RoboDK的主窗口,自动导入文件
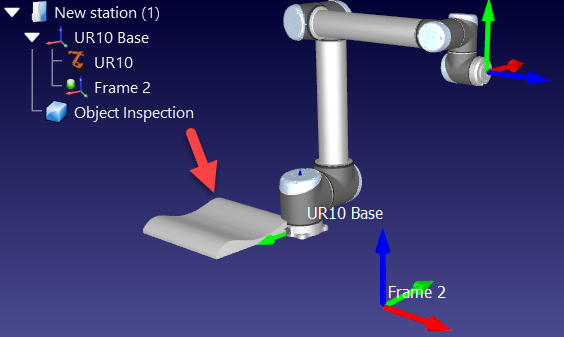
4.将对象拖放到参考框架中第二帧(站内树)
提示:
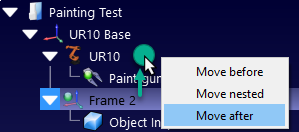
通过按住右键拖放对象来重新排列树中的项目。
重要的是:
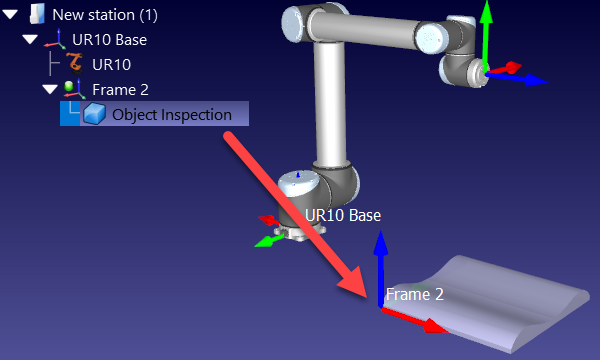
将对象嵌套在参考系中是很重要的,这样可以根据对象来教导目标。然后,如果参考系移动,目标也会随对象一起移动。
![入门-图16]()
提示:
对于大型STEP或IGES文件,可以通过选择加快导入速度:
工具➔
选项➔
计算机辅助设计➔
快速导入设置。有关详情,请参阅步骤/ IGES节.
提示:
虽然对象可以相对于它们所附加的参考系移动(通过双击对象并输入坐标),但建议始终相对于给定的参考系来维护它们,而不是移动参考系。这允许通过从/到机器人控制器更新参考系来正确匹配对象引用。
![开始-图17]()
![入门-图18]()