开始
一旦你在RoboDK中准备好了模拟,你就可以很容易地生成机器人程序,这样你就可以在机器人控制器上执行程序,而不必编写一行代码。
您可以单独导出任何程序或主程序,包括子程序:
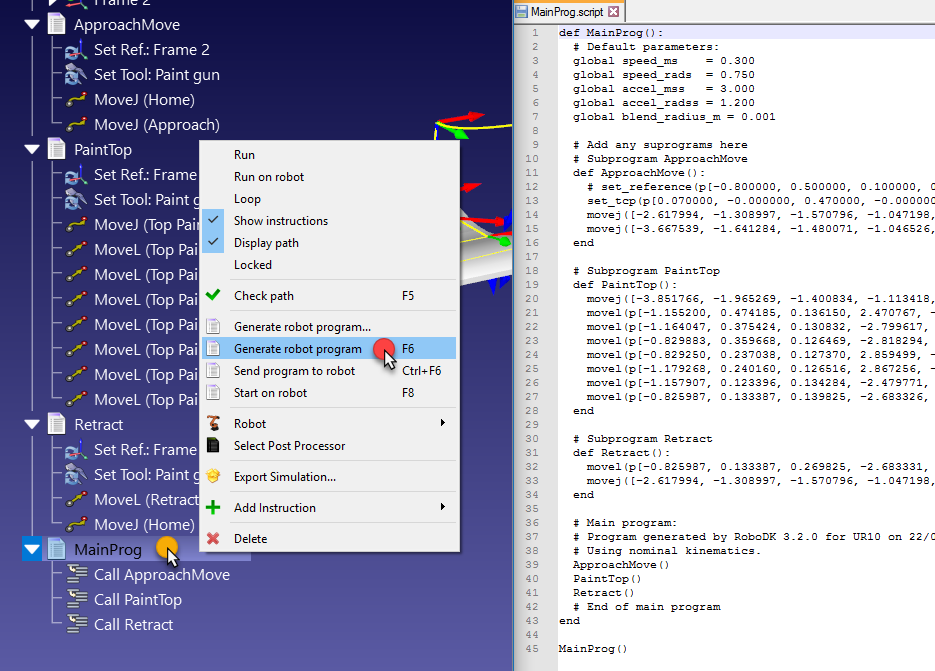
1.右键单击程序(MainProg例如)。
2.选择生成机器人程序(F6).
另外,选择生成机器人程序…指定保存文件的位置。
3.UR机器人的脚本程序将显示在文本编辑器中。
您获得的文件是脱机生成程序的结果。该文件可以发送到机器人控制器,以运行在RoboDK中模拟的相同运动。
o选择发送程序给机器人(Ctrl+F6)通过FTP(离线编程)发送程序2022世界杯8强赛时间
o检查选项在机器人上运行在每次运行程序时一步一步地运行程序(在线编程)。这允许在机器人上执行程序,因为它是模拟在同一时间。在线编程需要机器人司机。
可以更改UR机器人的后处理器并自定义程序生成的方式:
1.右键单击程序或机器人。
2.选择![]() 选择后处理程序。
选择后处理程序。
3.选择通用机器人URP。
再次生成程序。在这个例子中,默认的后置处理器使用关节值来定义每个线性移动,第二个后置处理器使用笛卡尔坐标来定义每个线性移动。