开始
您可以轻松地创建一个新程序,安全地将机器人从零件缩回到安全位置。
类似于前面的操作:
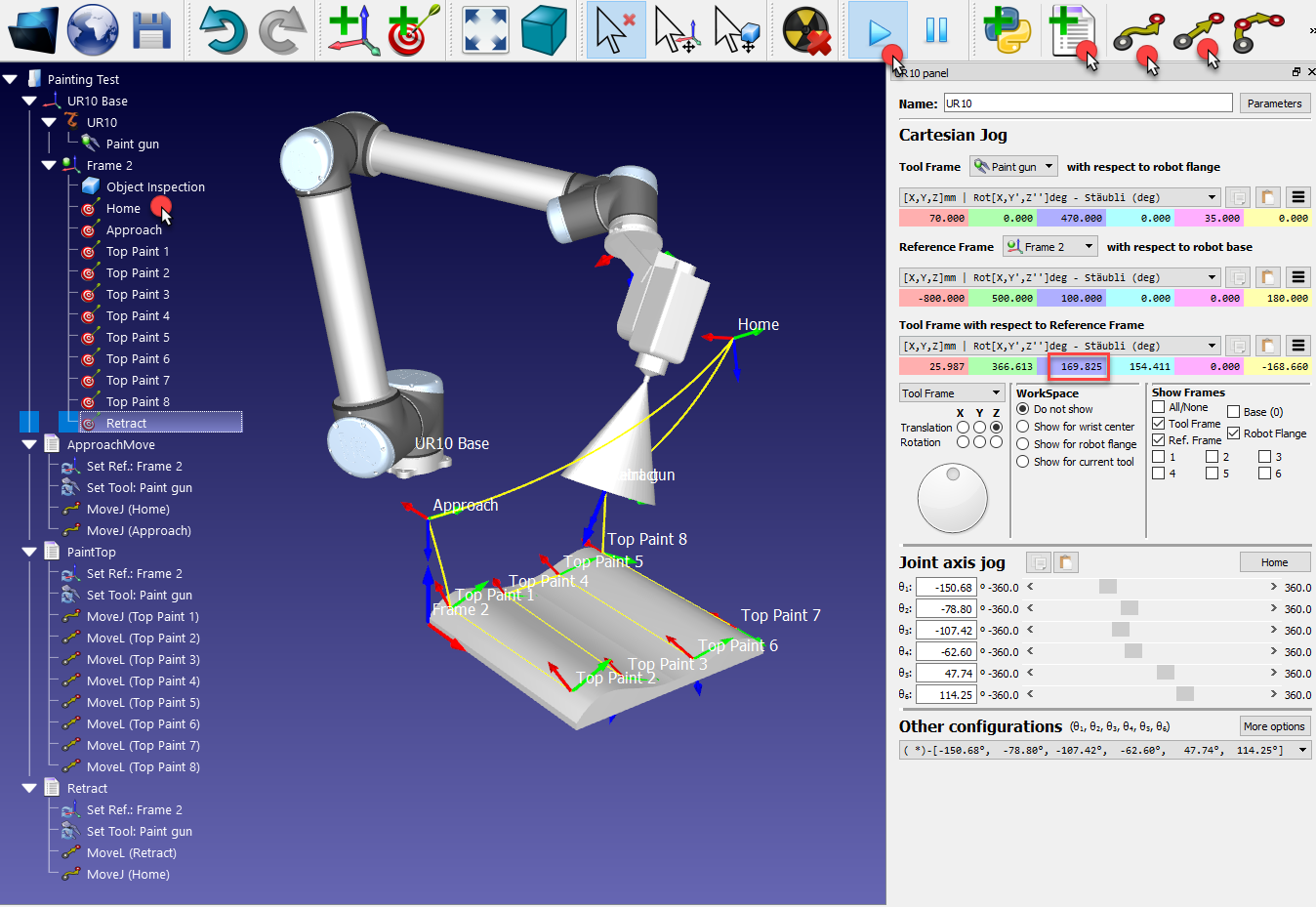
1.将机器人放置在最后一个目标上,通过增加TCP相对于机器人面板中参考系的Z坐标来向上移动机器人(下一张图像中突出显示的情况)。
2.选择程序➔![]() 添加程序,或工具栏中的适当按钮。
添加程序,或工具栏中的适当按钮。
3.选择程序➔![]() 移动线性指令,或工具栏中的适当按钮
移动线性指令,或工具栏中的适当按钮![]() .将其重命名为收回按F2关键。
.将其重命名为收回按F2关键。
4.选择首页目标
5.选择程序➔![]() 移动联合指令.一个新的移动指令将被添加,链接到Home目标。
移动联合指令.一个新的移动指令将被添加,链接到Home目标。
通过双击模拟每个程序。模拟可以通过按住空格键或选择快速模拟按钮来加速![]() /
/![]() .
.