开始
参考框架允许将物体相对于机器人或相对于3D空间中的其他物体放置(包括位置和方向)。
添加一个新的参考系:
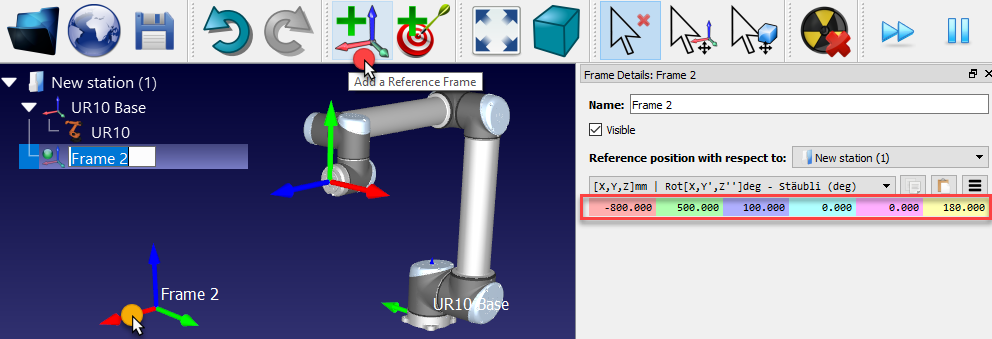
1.选择程序➔![]() 添加参考系
添加参考系
或者,在工具栏中选择相应的按钮
2.双击参考框架(在树上或在主屏幕上的3D几何图形上),输入图像中显示的坐标(X,Y,Z位置和方向的欧拉角)。鼠标滚轮可用于每个机箱的顶部,以快速更新主屏幕上参考帧的位置。
默认使用以下颜色:
●X坐标➔红色的
●Y坐标➔绿色
●Z坐标➔蓝色的
●第一次欧拉旋转➔青色
●二次欧拉旋转➔品红色的
●第三欧拉旋转➔黄色的
3.选择视图➔使参考系更大(+)增加参考帧的大小
4.选择视图➔缩小参考系(-)减小参考系的尺寸
5.选择视图➔在屏幕上显示/隐藏文本(/)在屏幕上显示或隐藏文本
6.可选地,通过选择重命名树中的任何参考系或对象F2
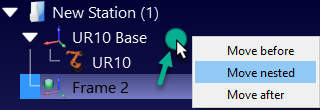
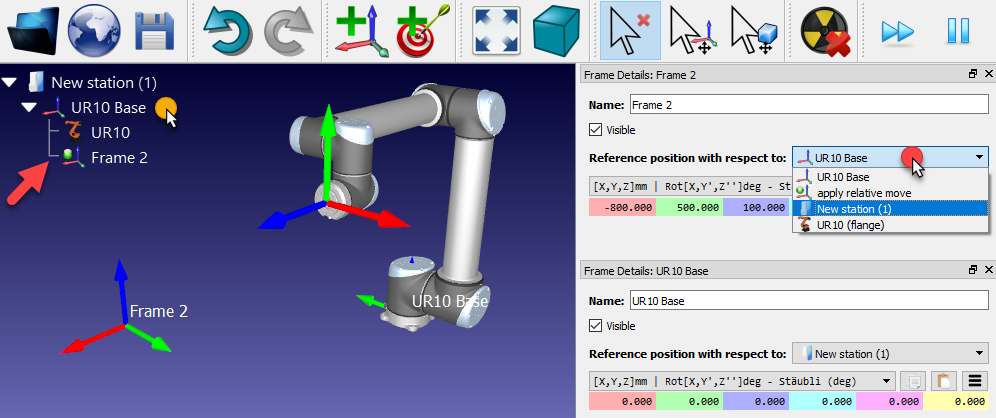
如果使用了多个参考帧,可以将它们拖放到Station Tree中,以匹配实际设置中存在的依赖项。例如,参考坐标系2可以相对于机器人基本参考放置。在这种情况下,如果UR10 Base引用被移动,Frame 2也会随之移动。如果使用其他机器人或参考系,考虑到这一点是很重要的。下一张图显示了依赖性的差异。
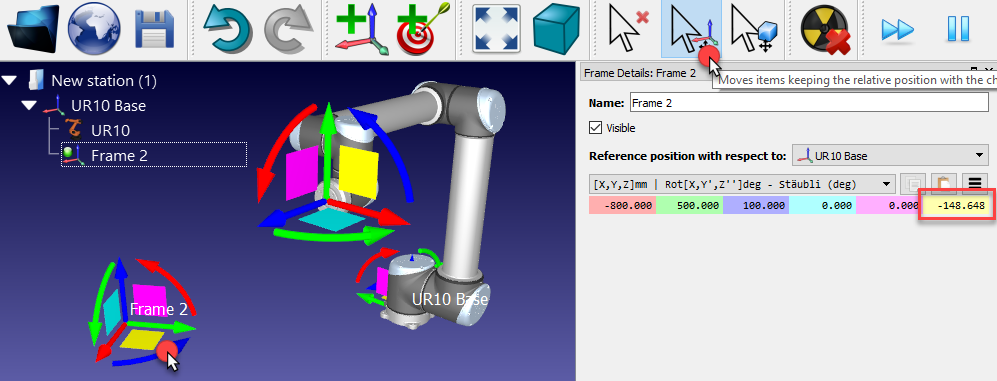
即使依赖关系不同,仍然可以输入或检索任何参考系相对于任何其他参考系的坐标,如下图所示。大多数机器人控制器需要参考坐标系相对于机器人基坐标系的坐标。
控件也可以在主屏幕中移动参考帧Alt键,或选择工具栏中相应的按钮![]() .然后,在屏幕上用鼠标拖动参考。当引用被移动时,相应的坐标值将被更新。
.然后,在屏幕上用鼠标拖动参考。当引用被移动时,相应的坐标值将被更新。