开始
你可以很容易地创建一个新的程序,安全地接近机器人的部分。
按照以下步骤创建一个程序,从首页目标是方法目标:
1.选择程序➔![]() 添加程序从菜单或工具栏中相应的按钮(如下图所示)
添加程序从菜单或工具栏中相应的按钮(如下图所示)
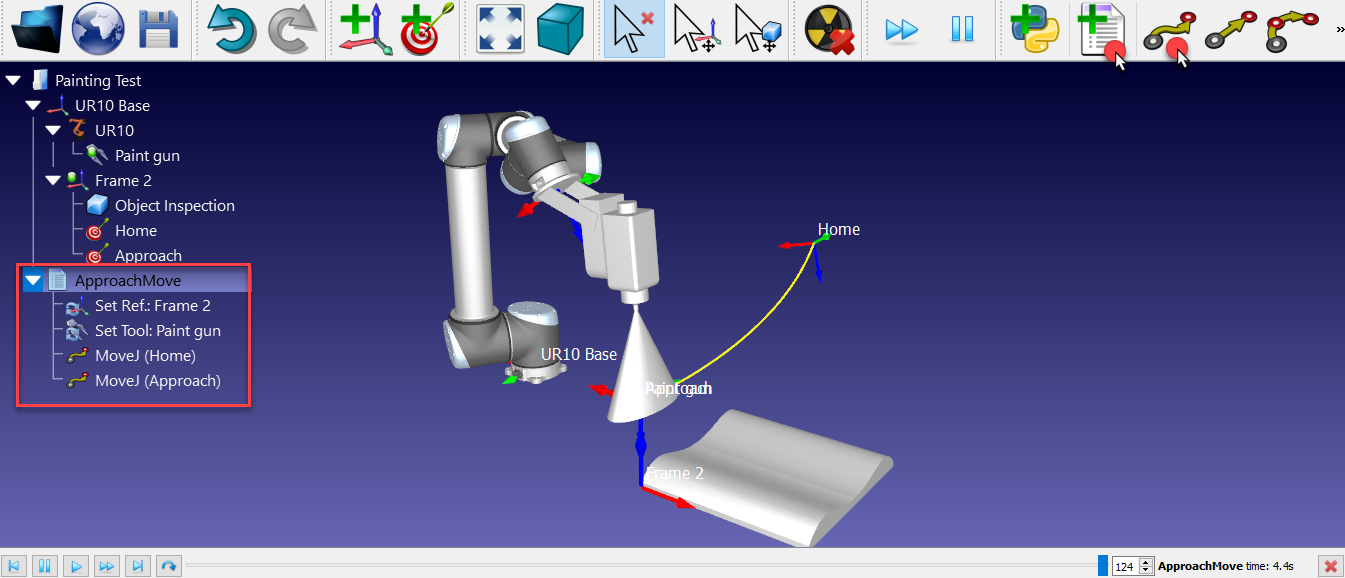
2.将程序重命名为ApproachMove
3.选择首页目标
4.选择程序➔![]() 移动关节指令(或工具栏中相应的按钮)
移动关节指令(或工具栏中相应的按钮)
将自动添加两条指令,告诉机器人我们正在使用的工具框架和参考框架。
5.选择方法目标
6.选择程序➔![]() 移动关节指令再一次。
移动关节指令再一次。
双击ApproachMove程序,并执行程序仿真。将显示仿真条和估计的周期时间。