一般建议
本节将解释如何在共享一个公共参考框架的情况下对两个或多个机器人进行离线编程。
在一个典型的离线编程应用程2022世界杯8强赛时间序中,对象的位置是相对于机器人更新的。然而,当两个或多个机器人用于同一个应用时,每个机器人的位置必须相对于一个公共参考(参考对象或公共参考系)进行更新。
按照以下步骤更新两个或多个机器人相对于参考系的位置:
1.确保机器人参考系和物体参考系不相互依赖。如果存在依赖关系,我们应该将参考系附加到站项上。
2.为每个机器人的基本坐标系添加一个新的参考系,就好像你要为每个机器人定义一个新的单独参考系(裁判员A而且真实裁判B).
这个参考系将表示零件相对于每个机器人的真实位置。
3.使用标准分别校准这些参考系(真实参考系A和真实参考系B)参考校准程序(以三点法为例)
在这一点上,我们将看到3个参考系,它们应该是重合的,但它们不是。必须更新每个机器人的参考系来解决这个问题:
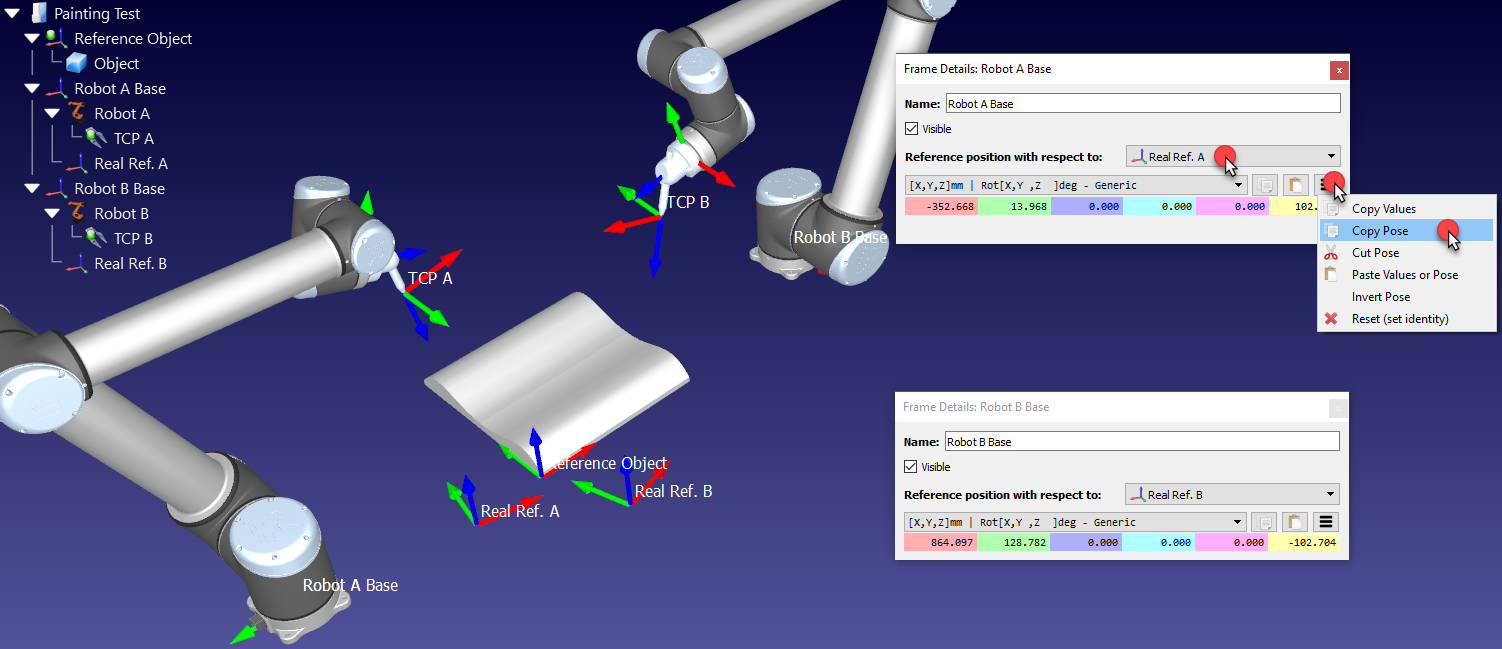
4.双击其中一个机器人引用,例如机器人A基地打开参考系窗口
5.根据该机器人的校准基准,复制该机器人基准的位置(裁判员A),按下复制按钮
6.在同一窗口中,更改的参考位置(下拉)到引用对象
7.粘贴复制的位置。机器人将被移动裁判员A将会与引用对象框架
8.对其他机器人重复步骤4-7,如果有的话
在这个过程的最后,所有的参考系应该匹配,所有校准的参考系和引用对象应该是一样的。