Spot welding
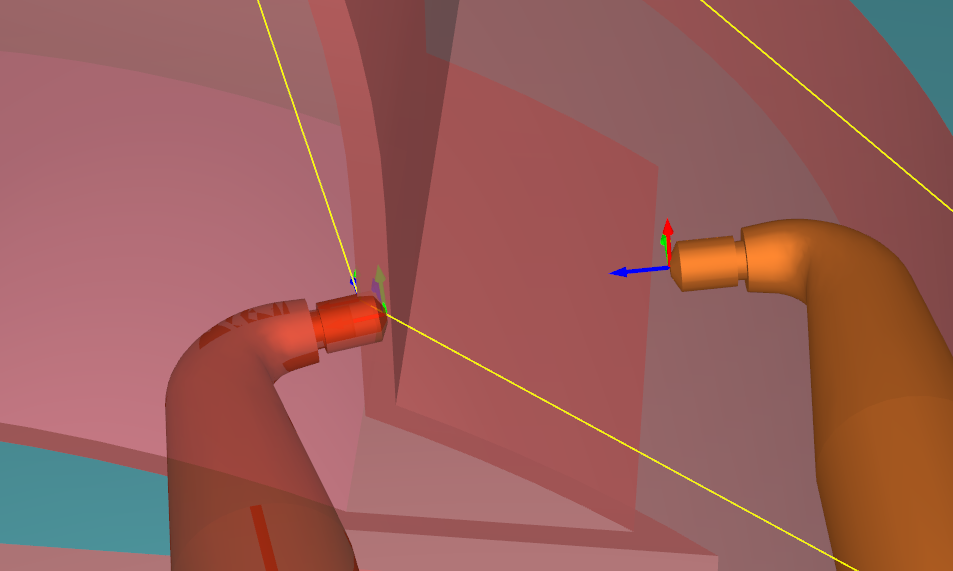
Once you have a path you can double check if there are any collisions and make sure you properly defined your collision map.
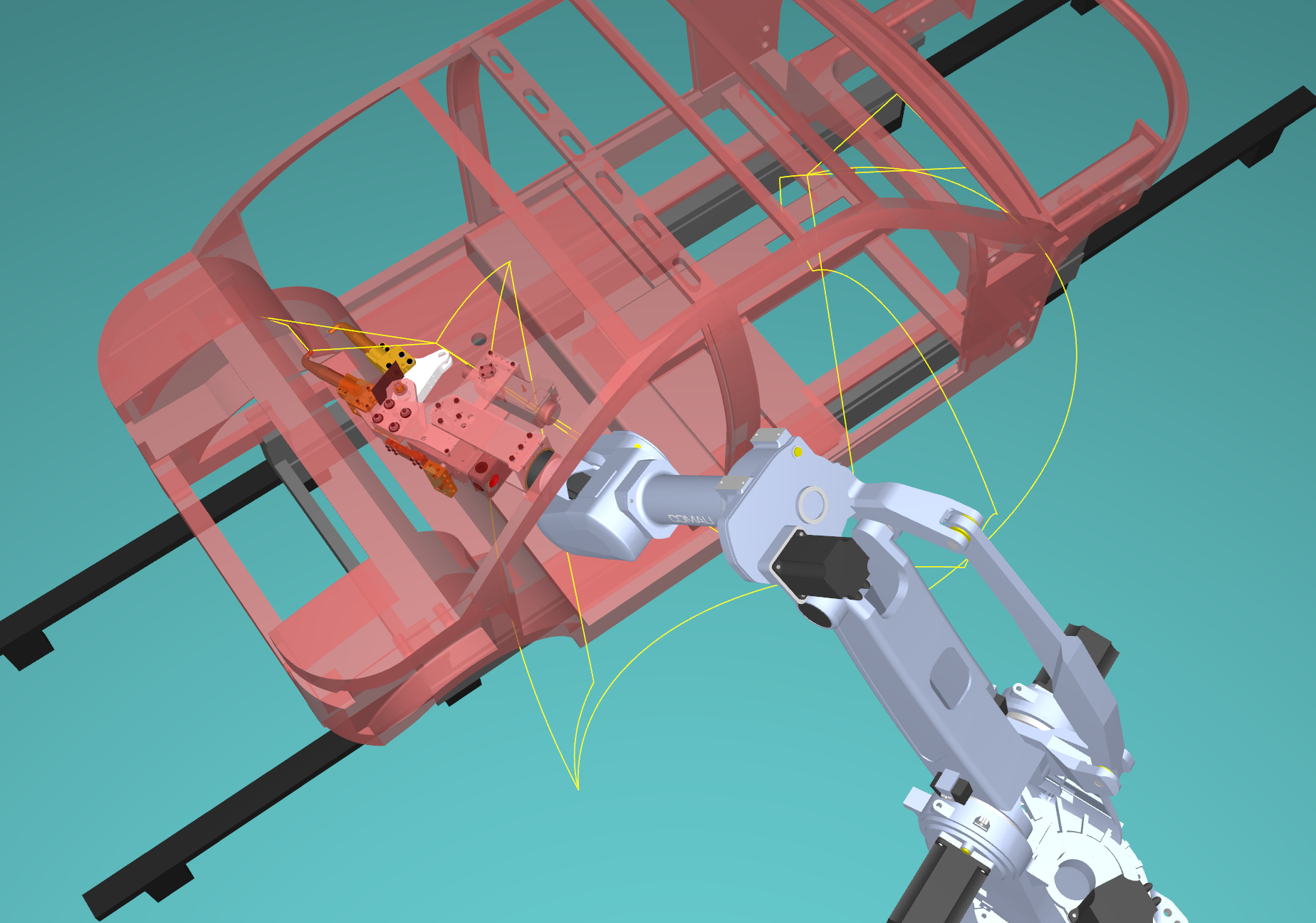
You can check if any parts collide by selectingTools➔Check Collisions. This enables/disables collision detection.
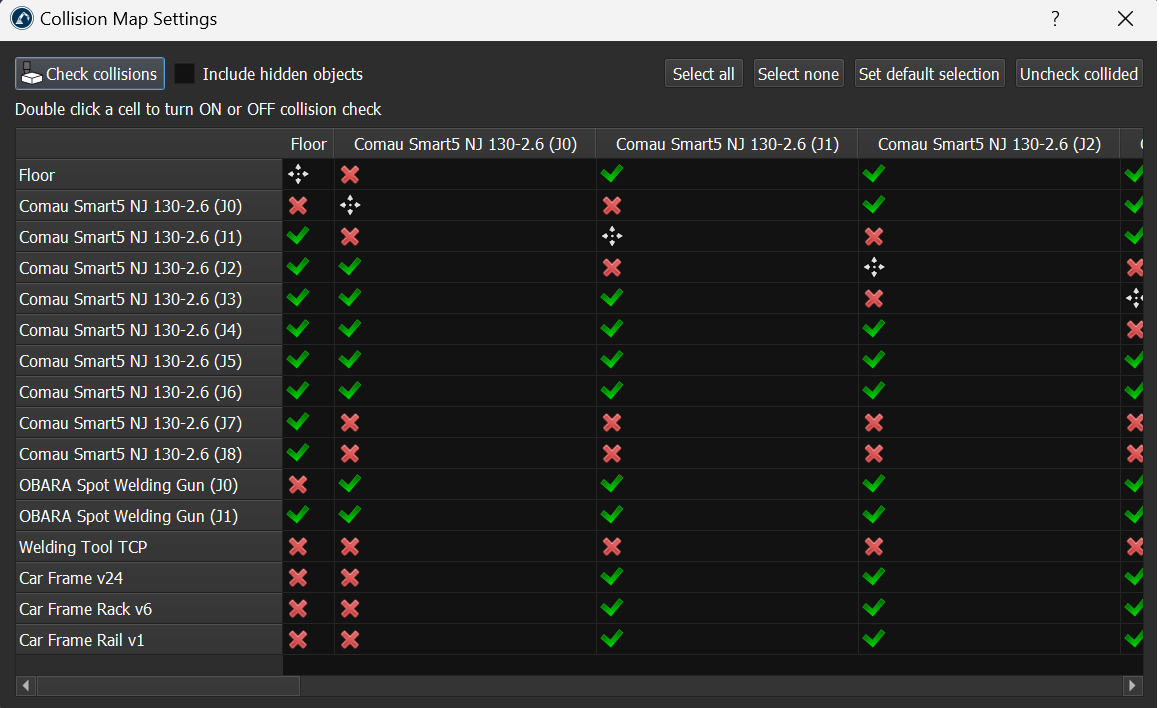
You can then configure the collision map by selectingTools->Collision map.