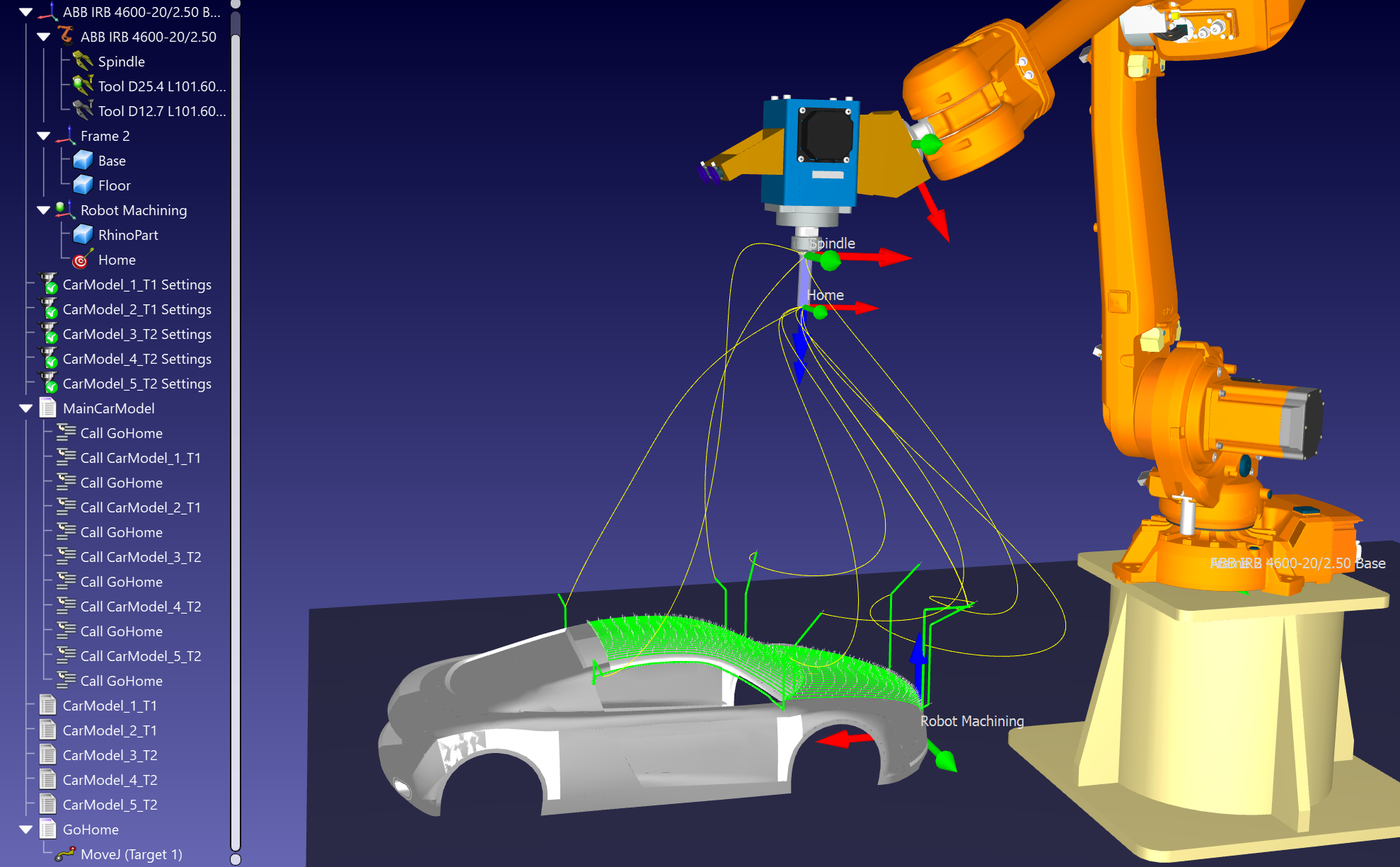
机器人加工(5倍)
为了使机器人加工作业之间的转换更安全,您可以使机器人在每次加工操作后移动到接近位置。
按照以下步骤创建一个名为转转并在每个加工作业完成后移动到此位置:
1.通过选择创建一个新程序程序➔添加程序或者选择工具栏中相应的按钮。
2.按下重命名程序F2就像这样转转。
3.选择您刚刚创建的程序。
4.将机器人移动到安全位置并选择程序➔移动关节指令或者选择工具栏中相应的按钮。该操作应该在该位置上创建一个新目标,并在该目标上添加一个移动关节指令(如果先前选择了该程序)。
5.然后,通过右键单击第一个程序调用指令并选择,可以使机器人在每次加工操作之间移动到此主目标加法指令➔程序调用指令.
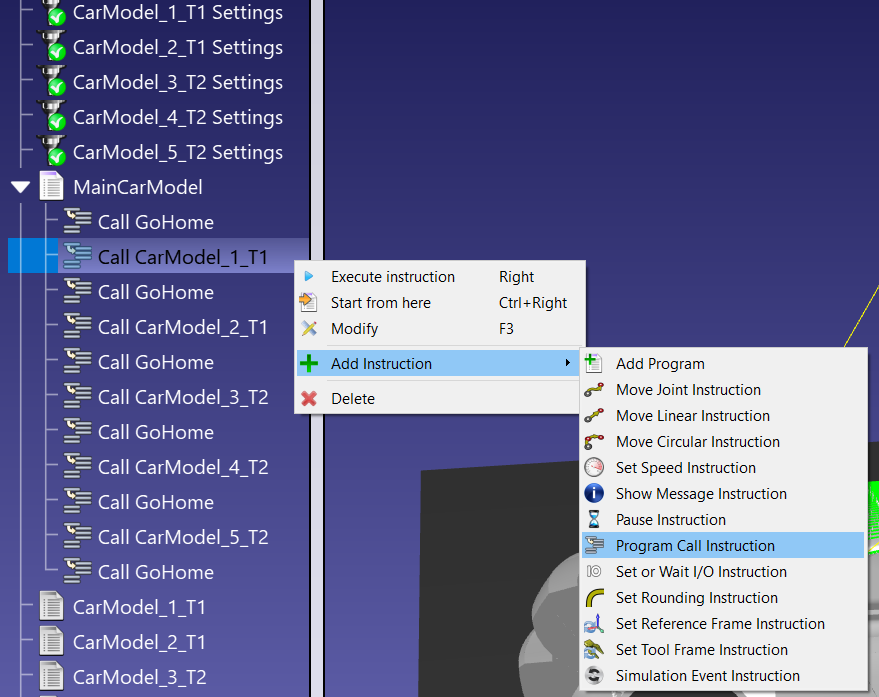
6.输入要进入的程序的名称(GoHome),然后选择OK。
7.然后你就可以复制/粘贴此指令在您的程序内快速获得最终结果。
8.右键单击主程序并选择显示路径将机器人工具路径视为黄线。这将帮助您可视化您的接近目标的位置是否适合您的项目。