机器人加工(5倍)
您可以很容易地定制刀具的方向沿您的机器人加工程序,教首选的方向。
在这个例子中,我们可以改善最后2个加工操作的刀具方向:
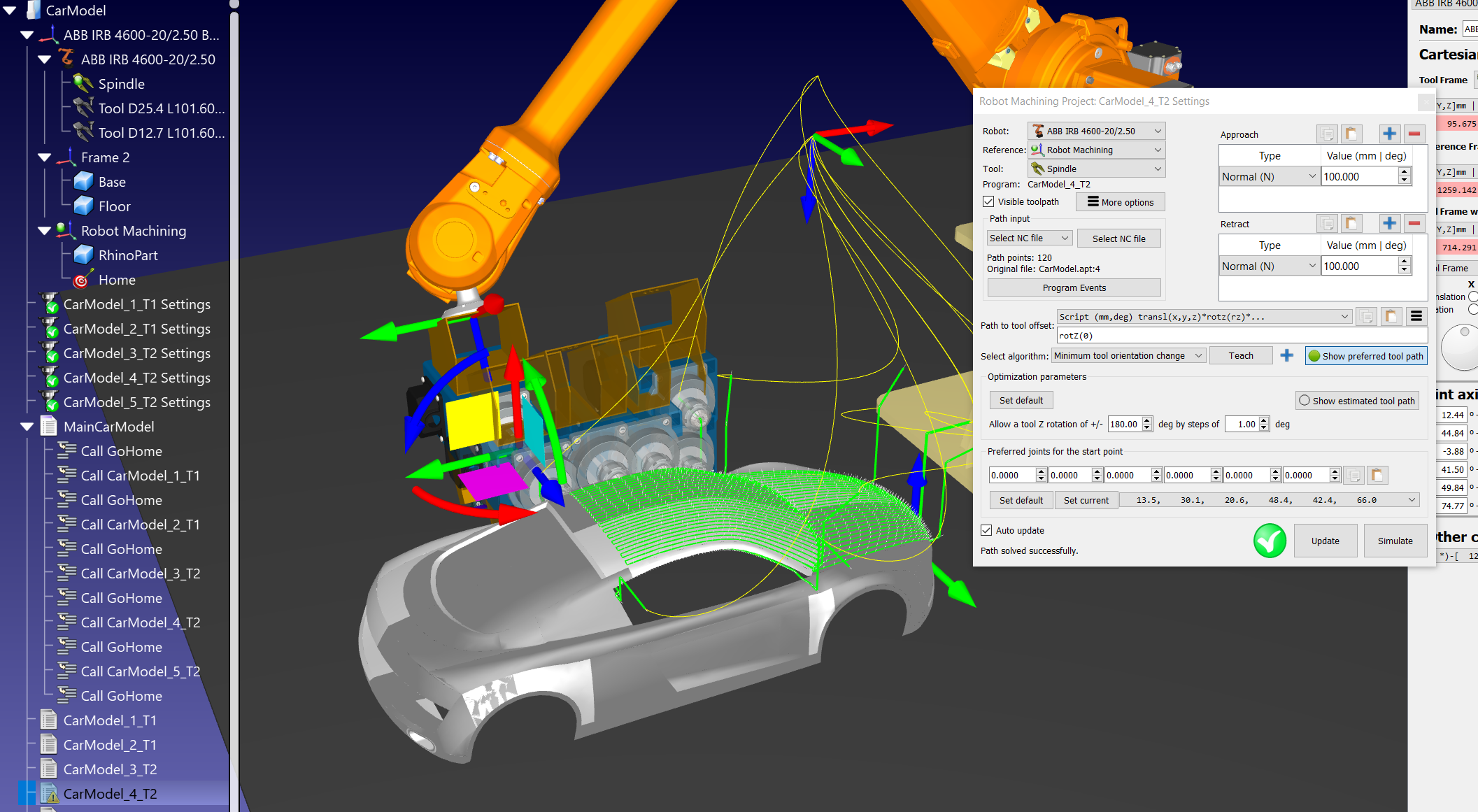
1.双击4th加工操作打开机器人的加工设置,进行该操作。
2.选择模拟或者运行相应的程序,使机器人停在加工路径的某一点上。
3.选择显示首选刀具路径按钮,以查看RoboDK将尝试使机器人遵循的工具方向。
4.举行Alt键抓取机器人工具,并抓取蓝色圆形箭头,绕工具的Z轴旋转。将工具方向移动到您想要遵循的方向。
5.在机器人加工菜单中选择Teach来说明沿着路径的方向。通过选择教,您告诉RoboDK您想要遵循当前的工具方向,因此设置将调整以匹配该方向。
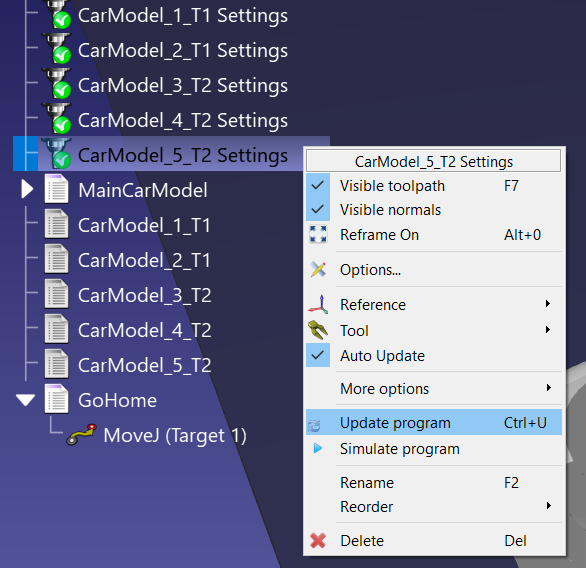
6.选择更新重新计算路径。
选择模拟运行模拟(或双击生成的程序)。
7.如果结果符合您的期望,则可以复制设置并将其粘贴到另一个工具路径中:右键单击机器人加工设置并选择复制设置.然后,右键单击新的机器人加工设置并选择粘贴的设置.再次右键单击最后一个机器人加工项目并选择更新程序更新与该机器人加工作业相关的程序。