机器人加工(5x)
控件,可以为机器人加工夹具创建新的坐标系统程序菜单,然后添加参考系。
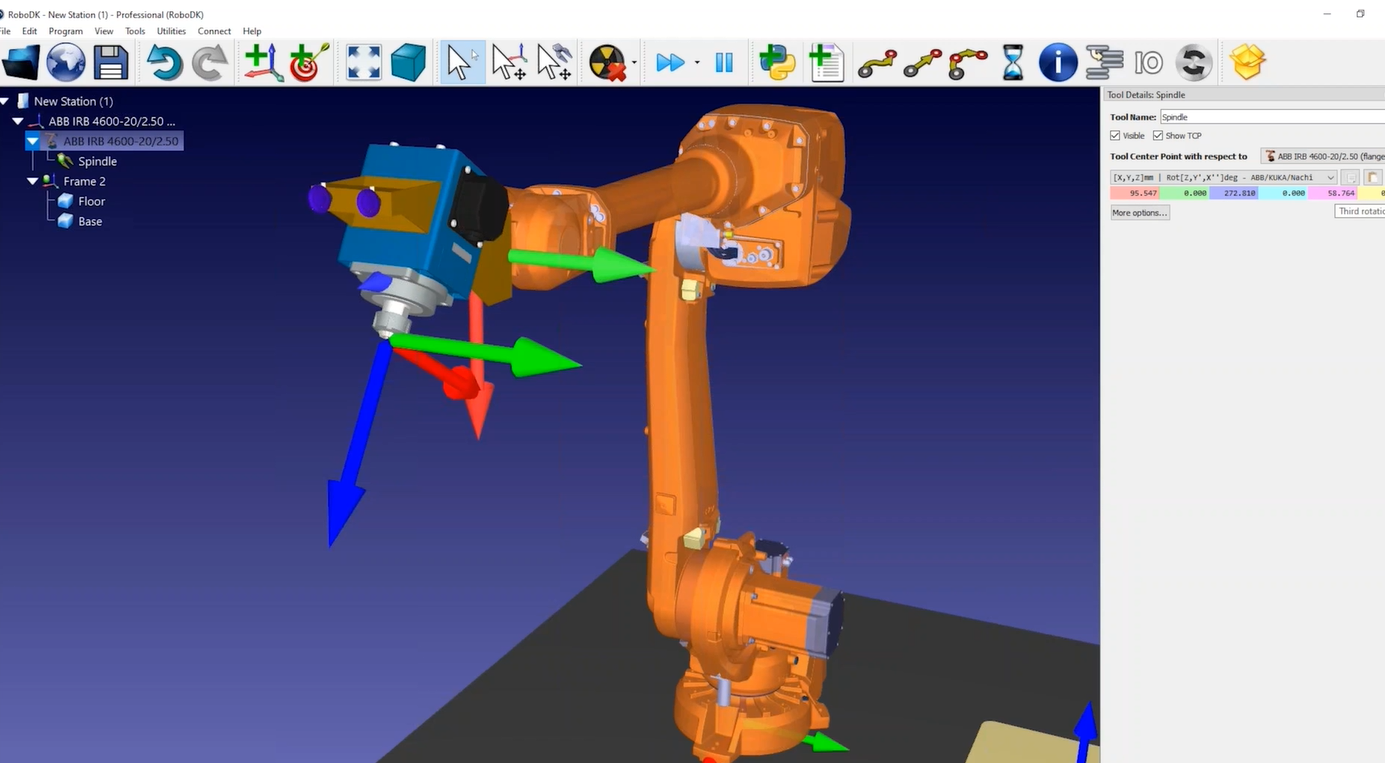
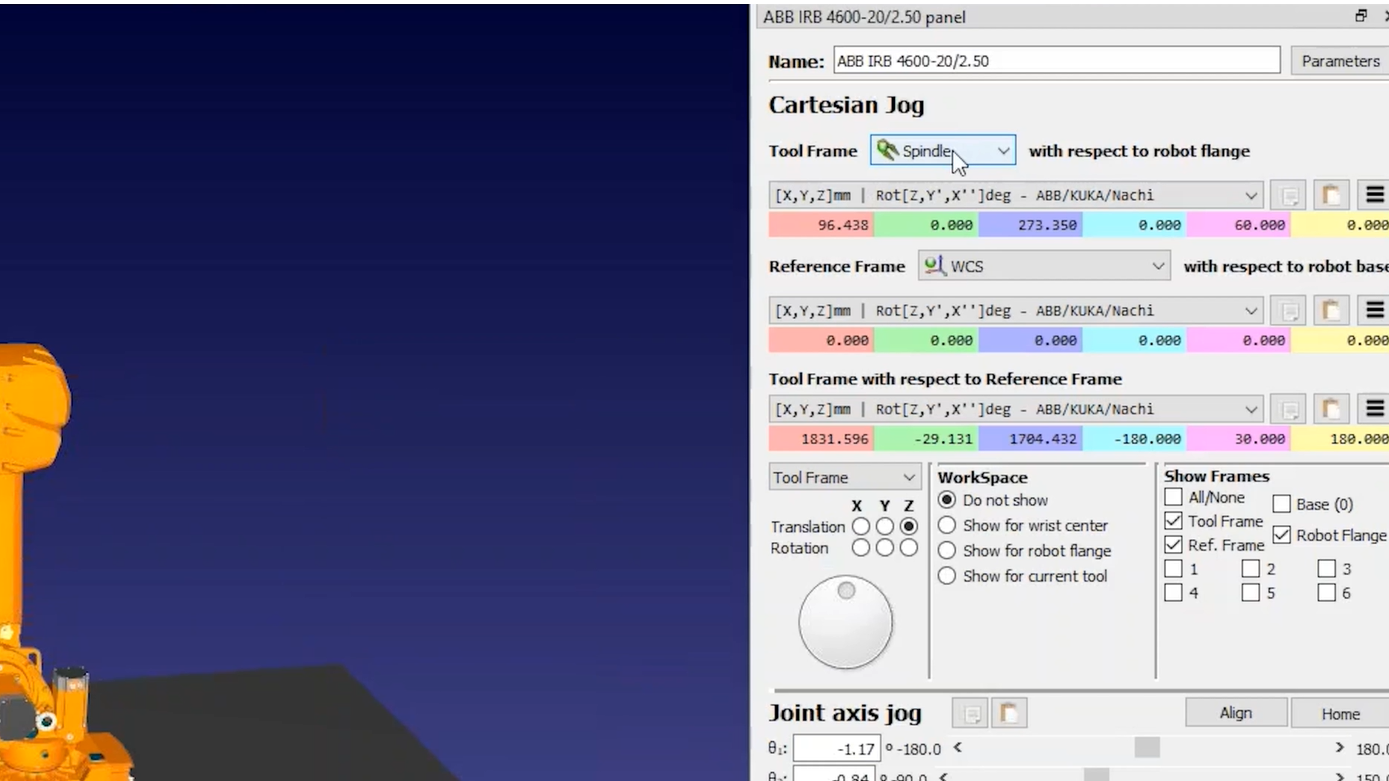
遵循以下步骤来正确定义工具(TCP):
1.如果您拥有工具的坐标,您可以输入它们(您可以在不同供应商特定的方向格式中选择输入工具姿势)。
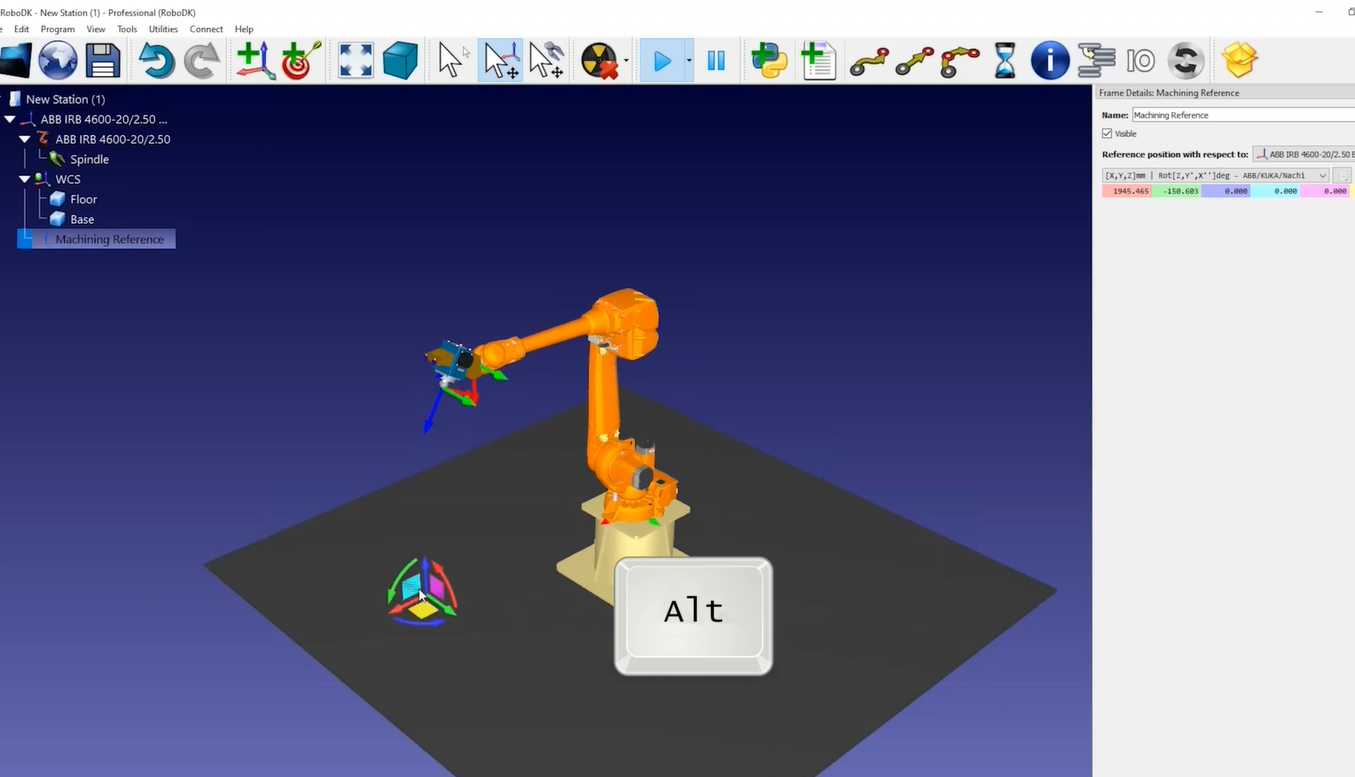
2.通过握住ALT键你可以移动机器人或任何坐标系。
3.通过握住ALT而且转变键,你可以修改你的TCP的位置和方向。
按照以下步骤添加另一个表示加工参考的坐标系:
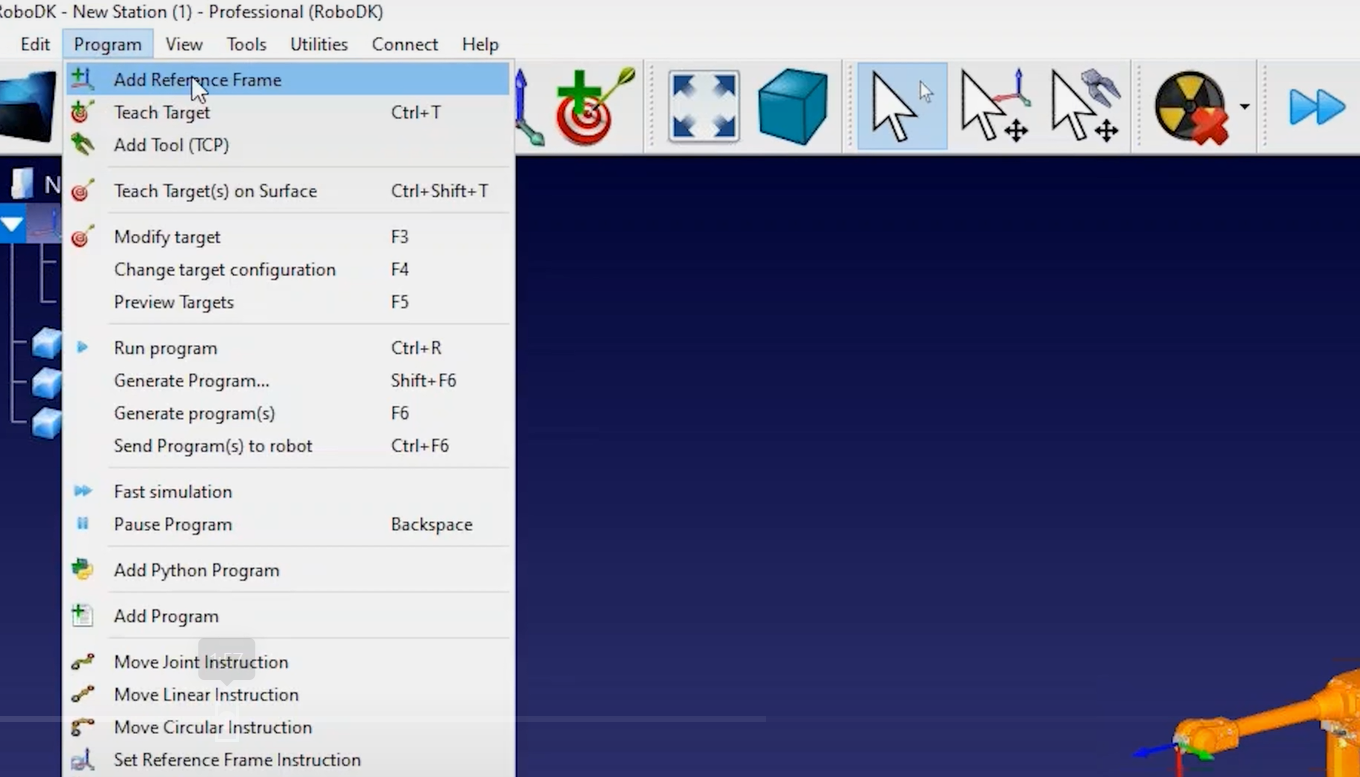
4.选择程序菜单,然后添加参考系.
5.通过按,可以重命名树中的项目F2或者右键单击并选择重命名。
6.通过握住ALT如果你有机会选择放置零件的位置,你可以将坐标系统移动到你想要的位置。
7.你可以双击机器人来查看你使用的工具和坐标系。对于机器人的给定位置,您在机器人面板中看到的值应该与您在机器人控制器中看到的值一致。
按照以下步骤保存你的机器人细胞:
8.一旦构建了机器人单元格,就可以通过选择将其保存为一个RDK文件文件➔省站.这将保存所有的设置,包括3D模型为一个文件。
9.在RoboDK中加载加工作业文件,RoboDK会自动为每个加工操作创建一个机器人加工项目。
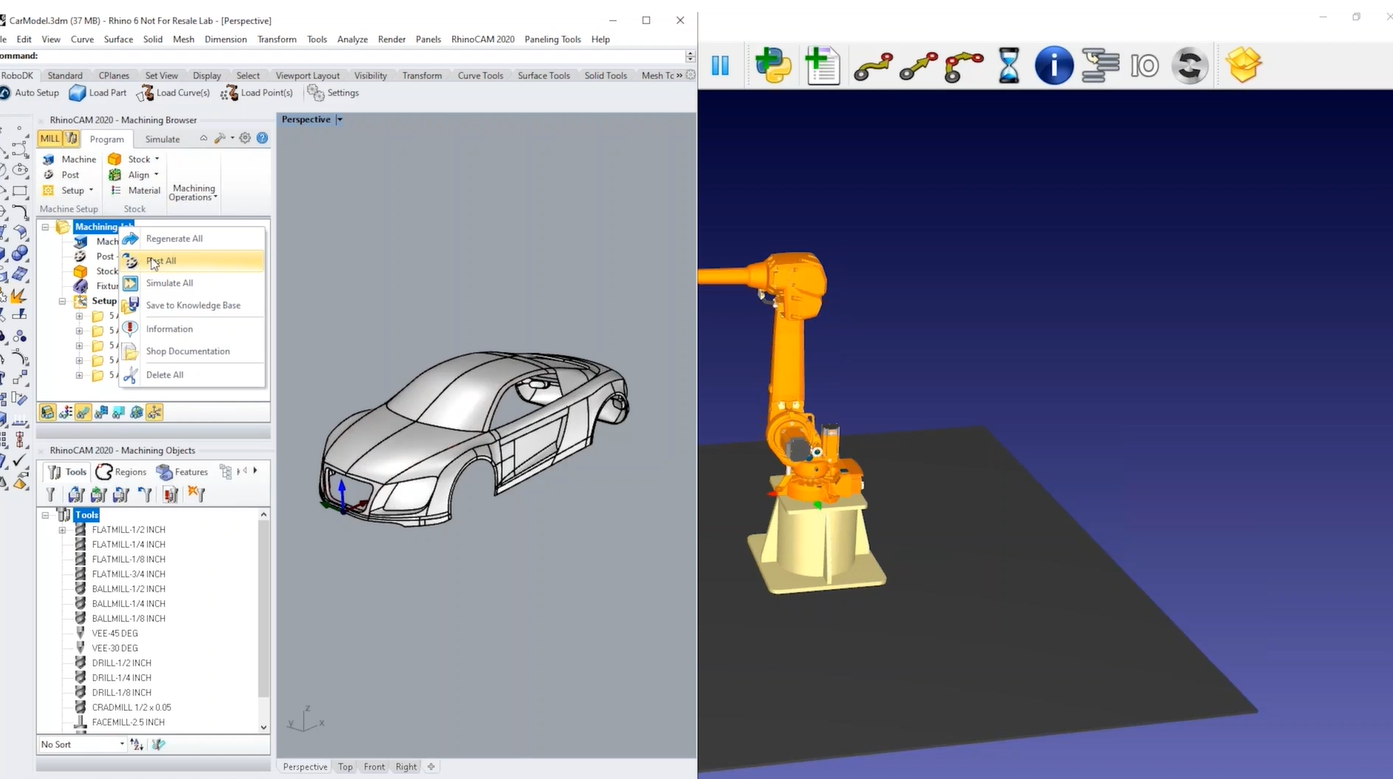
10.您可以选择更新看看RoboDK是否可以使用默认设置找到可行的路径。您还可以批量更新所有操作。
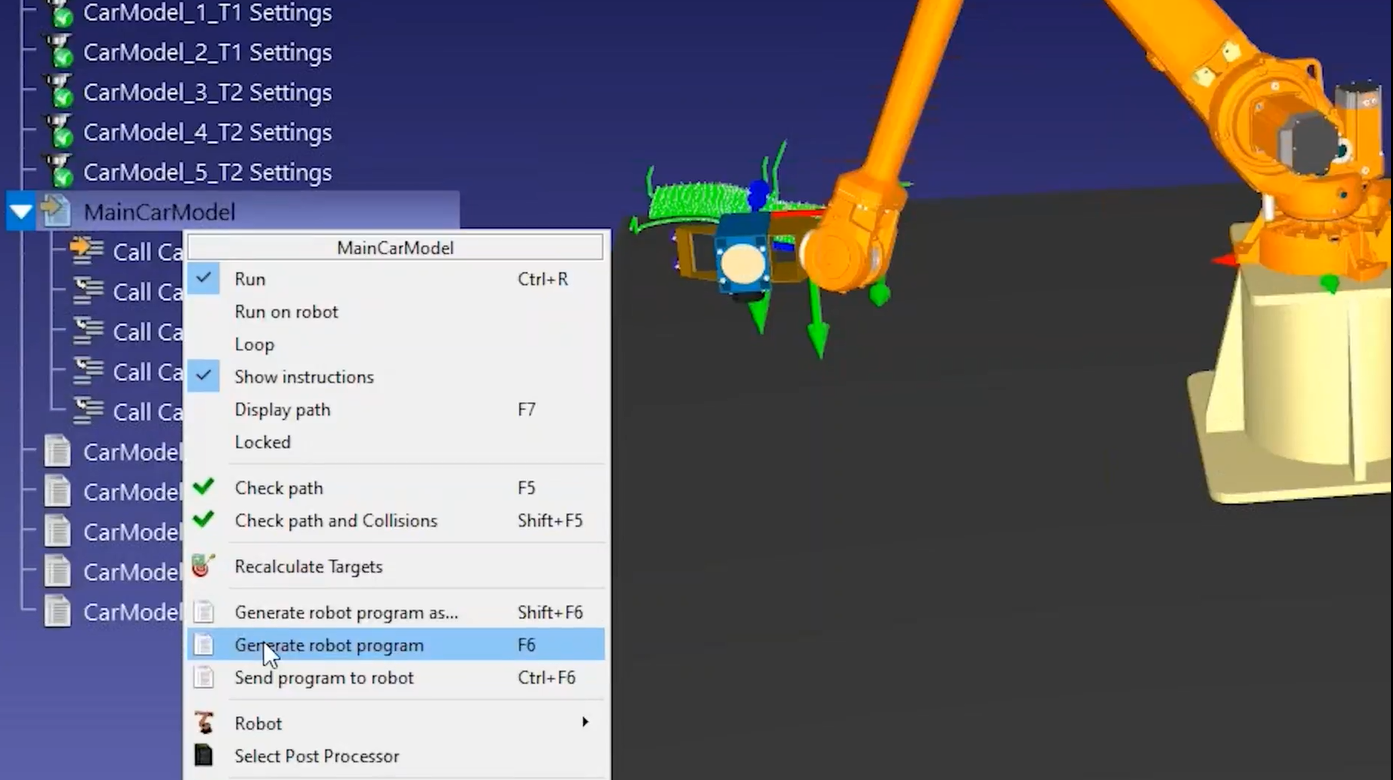
11.一旦你在RoboDK中有一个有效的模拟,你可以右键单击你的程序并选择生成程序.这将生成机器人控制器所需的文件。