机器人加工
您可以在RoboDK中创建机器人加工仿真,一旦您通过选择加载APT文件更新.这使您可以查看机器人是否可以执行制造操作。
这个例子是一个简单的3轴加工操作,默认设置给我们一个有效的结果。机器人加工项目允许您控制机器人沿加工刀具路径的行为。
您可以按照以下步骤更新剩余的机器人加工操作:
1.选择一个或多个机器人加工操作(握住)转变允许您在树中生成多个项目)。
2.右击所选项目。
3.选择更新程序.
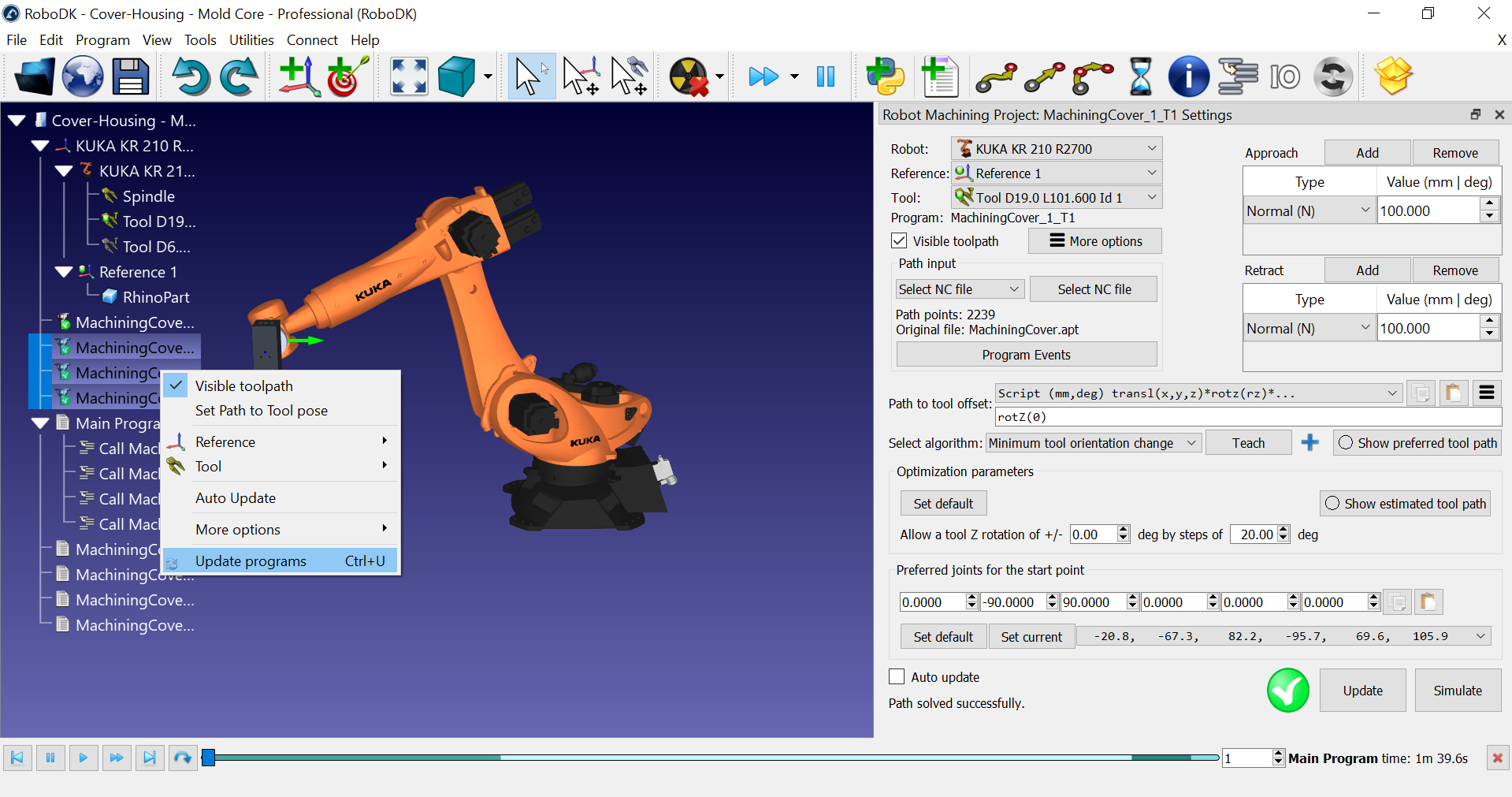
当RoboDK计算机器人加工路径时,它将为每个加工操作创建一个新的机器人程序。白色图标代表机器人程序。这些程序是由RoboDK自动创建的。可以分别模拟每个程序双击它在树上。
RoboDK还自动创建一个主程序,您可以运行它来模拟所有机器人加工操作的顺序。