碰撞检测
要使用运动规划器,需要有一个机器人,最好带一个工具。在工作空间中至少有一个对象也是有意义的,否则不需要避免冲突。分配至少两个目标是有帮助的,它们将作为生成的无碰撞路径的开始和结束位置。
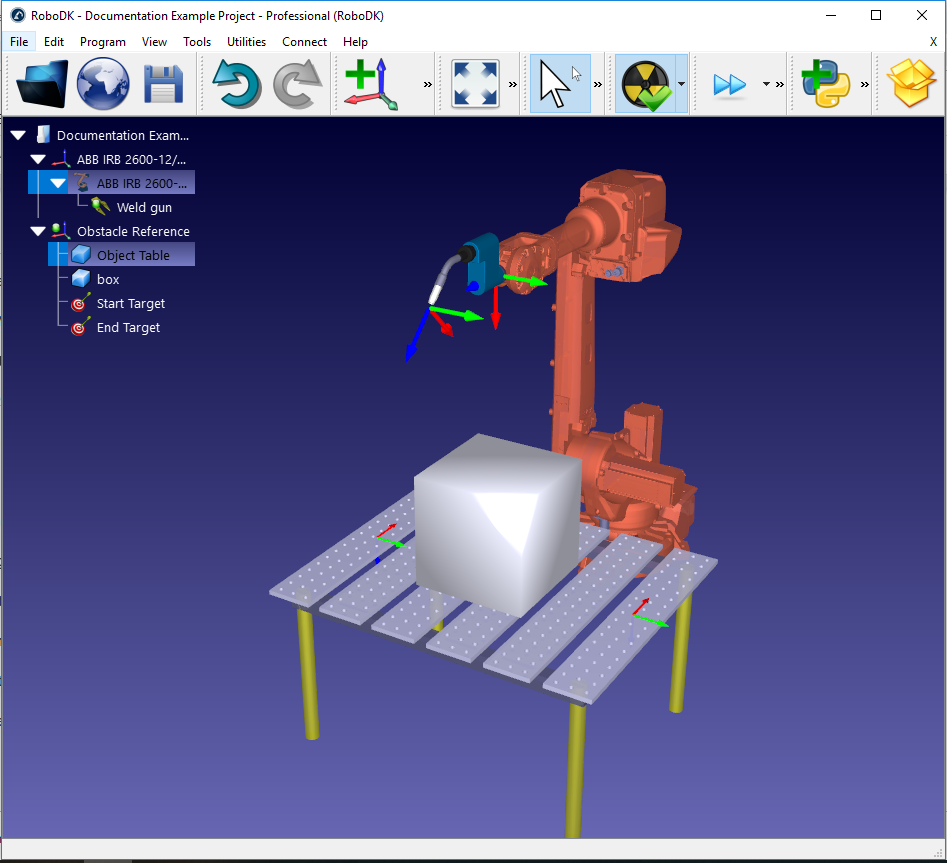
示例焊接设置可以使用以下过程创建:
1.选择一个机器人:
一个。选择文件➔![]() 开放网上图书馆
开放网上图书馆
b。使用过滤器找到你的机器人。例如,选择ABB IRB 2600-12/1.85(选择以下过滤器:ABB(品牌),10-20公斤有效载荷和1500-2000mm到达。
c。选择Downl2022世界杯国家队名单oad,机器人将自动出现在主屏幕上。
2.选择工具:
一个。从同一在线图书馆,按类型➔工具(点击重置过滤器首先要删除以前的过滤器)
b。2022世界杯国家队名单下载一个工具,例如“焊枪”
c。该工具应自动连接到机器人上
d。加载工具后,可以关闭在线库
3.添加一个参考系:
一个。选择程序➔![]() 添加参考系
添加参考系
b。在树中选择新的参考帧,按F2将其重命名为“Obstacle reference”
4.添加一些对象:
一个。选择文件➔![]() 开放打开位于计算机中的RoboDK库目录(它将位于RoboDK安装目录中)。
开放打开位于计算机中的RoboDK库目录(它将位于RoboDK安装目录中)。
b。选择一个对象,例如“object Table.wrl”。
c。将对象拖放到站点树中的障碍物参考上。
d。选择另一个对象,例如“box”。并将其拖到障碍物参考上。
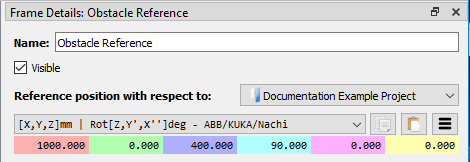
e。通过以下操作移动机器人前面的桌子:
我。右键单击障碍物参考,选择“选项(或者只是双击树中的参考),弹出框架的细节面板
2在面板中输入以下值参考位置:项目:1000, 0, 400, 90, 0, 0
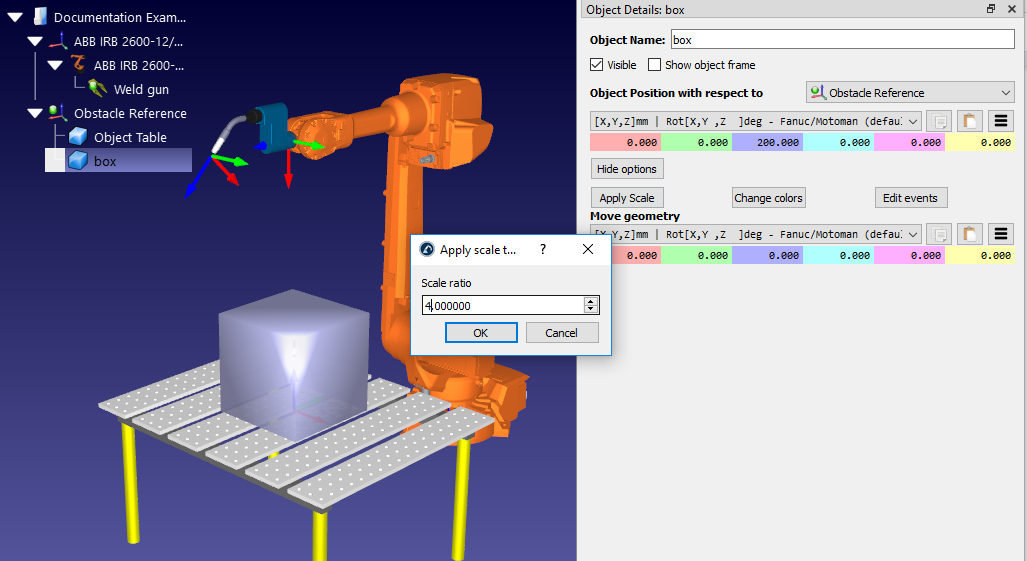
f。如有必要,按以下步骤增加对象的大小和位置(例如“box”):
3右键单击站点树中的对象并选择选项(或者只是双击树中的对象),打开对象的细节面板
4通过单击缩放框更多选项…➔应用规模输入“4.0”规模比
v。通过在面板中输入以下值将框移动到表中物体相对于障碍物参考的位置:0,0,200, 0,0,0
5.创建目标:
一个。选择程序➔![]() 教学目标
教学目标
b。在站点树中选择新的Target,并选择F2将其重命名为开始目标
c。通过这样移动目标:
6右键单击站点树中的目标并选择选项(或按F3)调出开始目标面板。
7中输入以下值相对于障碍物参考的目标位置面板:500、0、0、90、0、180
d。以同样的方式创建第二个目标,并将其重命名最终目标.使用与之前相同的方法,将其移动到位置:-500,0,0,90,0,180