运动规划器的“构建阶段”是通过以下过程实现的,该过程生成机器人工作空间的路线图:
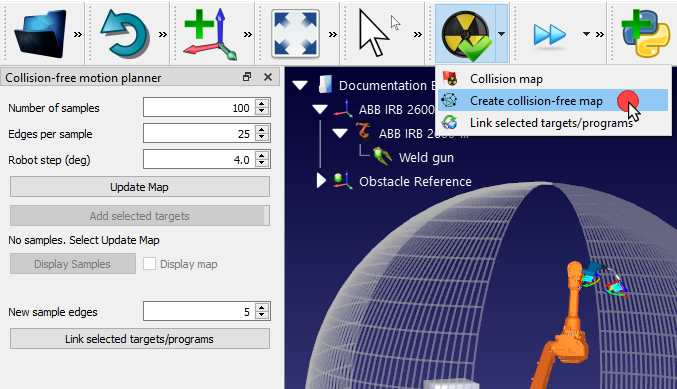
1.打开无碰撞运动规划器面板的公用事业公司菜单➔无碰撞运动规划器➔创建无碰撞地图,或点击旁边的小箭头检查碰撞并选择创建无碰撞地图。
2.输入新的参数或保持默认值。
3.点击更新地图生成路线图。
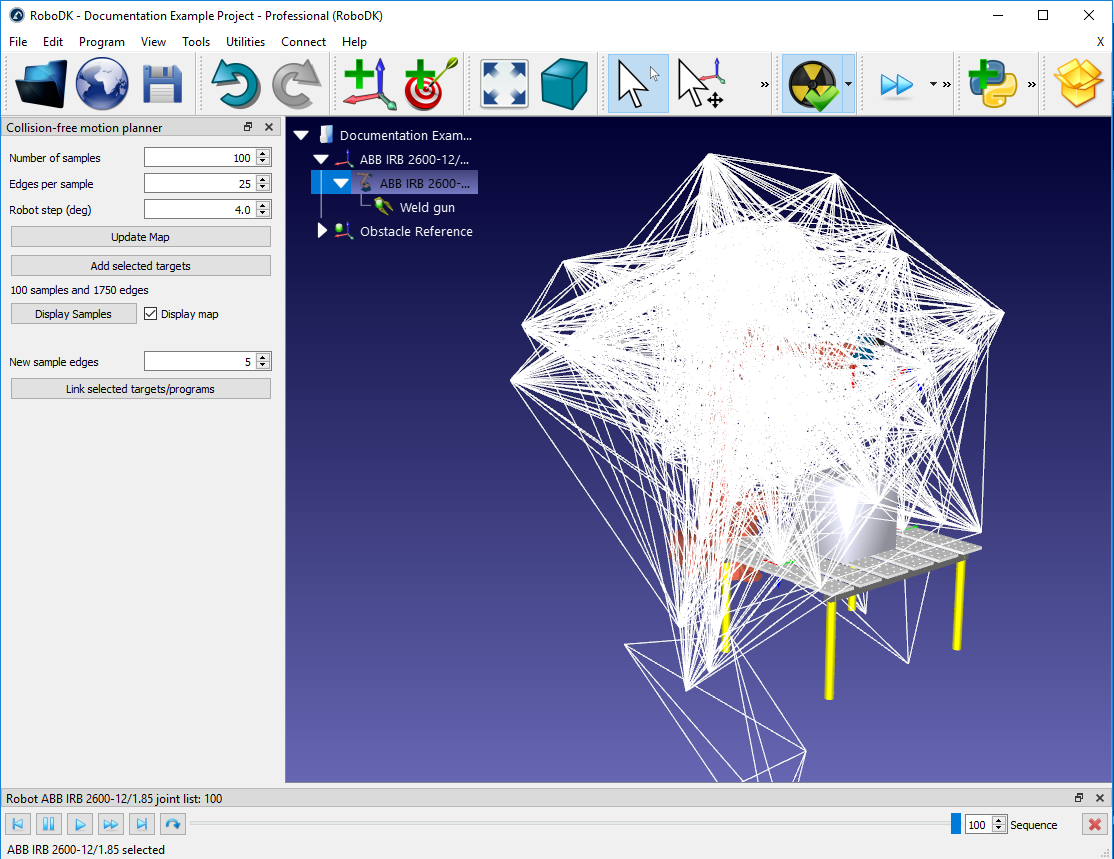
然后,PRM算法将使用所选参数生成路线图。完成后,可以通过选中复选框查看生成的路线图显示地图。点击显示样本将移动机器人通过工作空间内的所有样本。