Universal Robots
Robotertreiber bieten eine Alternative zur Offline-Programmierung (bei der ein Programm generiert, anschließend zum Roboter übertragen und ausgeführt wird). Mit Robotertreibern ist es möglich, eine Simulation direkt am Roboter durchzuführen (Online-Programmierung). Weitere Informationen finden Sie im Abschnitt Robotertreiber.
Roboterprogramme können direkt von RoboDK auf dem realen Roboter ausgeführt werden, wenn eine Netzwerkverbindung hergestellt wurde.
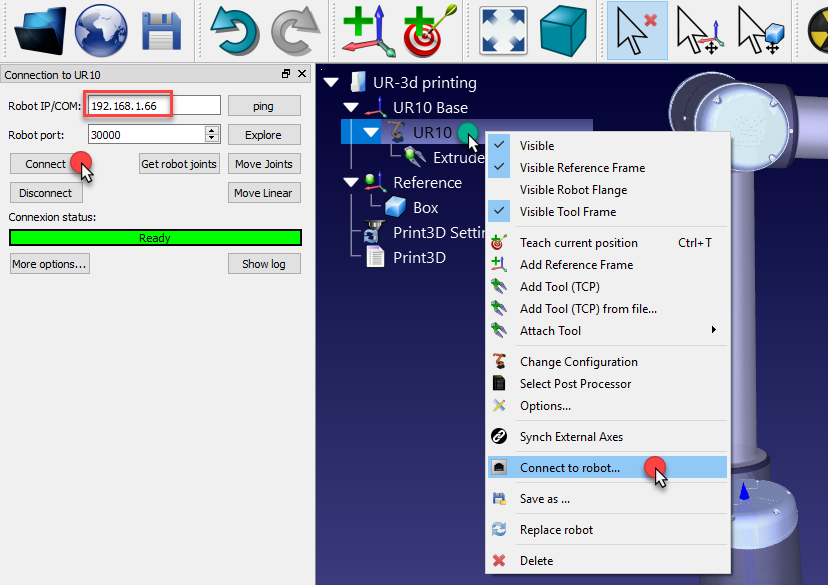
1.Klicken Sie mit der rechten Maustaste auf den Roboter in RoboDK
2.Wählen Sie:![]() 麻省理工学院机器人verbinden……
麻省理工学院机器人verbinden……
3.Geben Sie die IP des Roboters ein
4.Wählen Sieverbinden.
Es sollte eine grüne Nachricht angezeigt werden, die bereit anzeigt, wenn die Verbindung erfolgreich war.
Der Roboter kann bewegt werden, indem man机器人Achswinkel,PTP BewegungundLinearbewegungaus dem Verbindungsmenü auswählt.
Es gibt zwei verschiedene Methoden, um das Programm vom PC aus am Roboter zu starten:
1.Auf Roboter ausführenSchritt für Schritt mit Rückmeldung in RoboDK (Online Programmierung):
Bei dieser Methode wird der Roboter als Server verwendet und jeder Befehl wird Schritt für Schritt an den Roboter gesendet, wie er im Simulator ausgeführt wird. Diese Methode ist nützlich für Debugging-Zwecke.
a.Rechtsklick auf das Programm (Print3D in diesem Beispiel)
b.Wählen SieAuf Roboter ausführen (F6)
c.Doppelklicken Sie auf das Programm, um es zu starten (oder klicken Sie mit der rechten Maustaste und wählen Sie Ausführen)
Sobald diese Option aktiviert ist, wird jedes Mal mit dem realen Roboter eine Verbindung hergestellt, wenn wir auf ein Programm doppelklicken (oder wenn Sie mit der rechten Maustaste klicken und dannAusführenwählen).
Diese Operationen sind auch über die API verfügbar und ermöglichen die Integration von RoboDK in andere Anwendungen. Die API ist in Python und C # verfügbar.
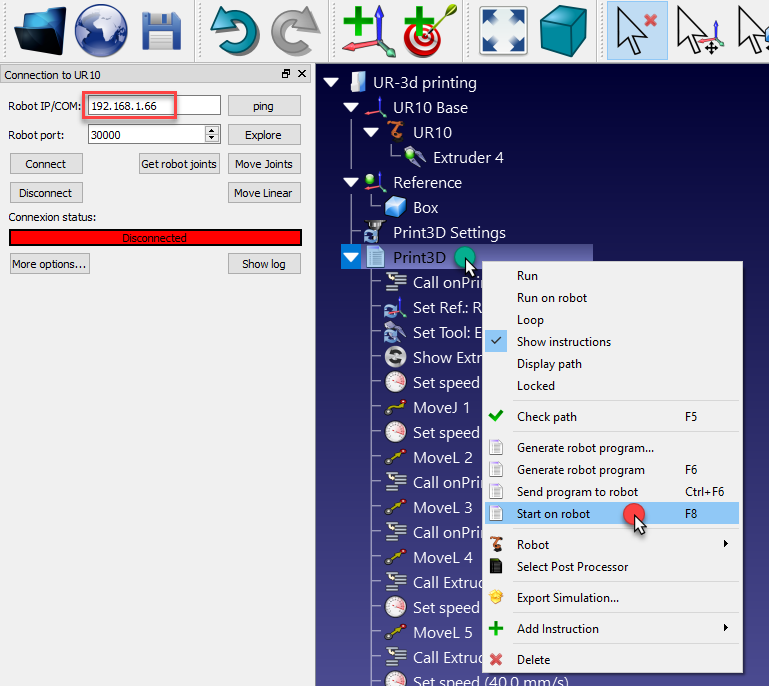
2.Auf Roboter startenerstellt das vollständige Programm, überträgt es auf den Roboter und startet das Programm auf dem realen Roboter (Roboter Offline Programmierung):
a.Rechtsklick auf das Programm (Prind3D in diesem Beispiel)
b.Wählen SieAuf Roboter starten (F8).