ISO9283 Performance Testing
Um Pfadgenauigkeitstests durchzuführen, muss ein RoboDK-Roboterprogramm erstellt werden, z.B. dasISO9283 Programm, das mit demISO-Würfel-Dienstprogrammerstellt wurde. Sie können das herstellerspezifische Roboterprogramm erzeugen, indem Sie das Programm auswählen und F6 drücken (oder wählen SieProgramm➔Programm erstellen). Alternativ ist es möglich, jedes andere in RoboDK erstellte Programm zu verwenden (z. B. eine Gerade, einen Kreis oder ein Quadrat).
Es ist zudem erforderlich, ein Messsystem zu haben, das die Position des Endeffektors verfolgen und die Positionsmessungen in Bezug auf ein Bezugssystem bereitstellen kann. Es müssen die grundlegenden Setup- und Tool-Setup-Verfahren in RoboDK verwendet werden (erforderlich für Kalibrierungs- oder Positionsgenauigkeitstests), um die Roboterbasis und das Werkzeugbezugssystem zu identifizieren.
Die Messdaten müssen erfasst werden, während der Roboter entlang des Programms bewegt wird. Die Messungen sollten unter Verwendung der Standardsoftware des Herstellers vom Messsystem kontinuierlich aufgezeichnet werden. Die Messungen sollten als CSV- oder TXT-Datei exportiert werden. Diese Dateien müssen XYZ-Positionsdaten sowie den Zeitstempel für jede Messung enthalten. Optional können diese Messungen die Ausrichtung des Werkzeugs in Bezug auf die Roboterbasis enthalten.
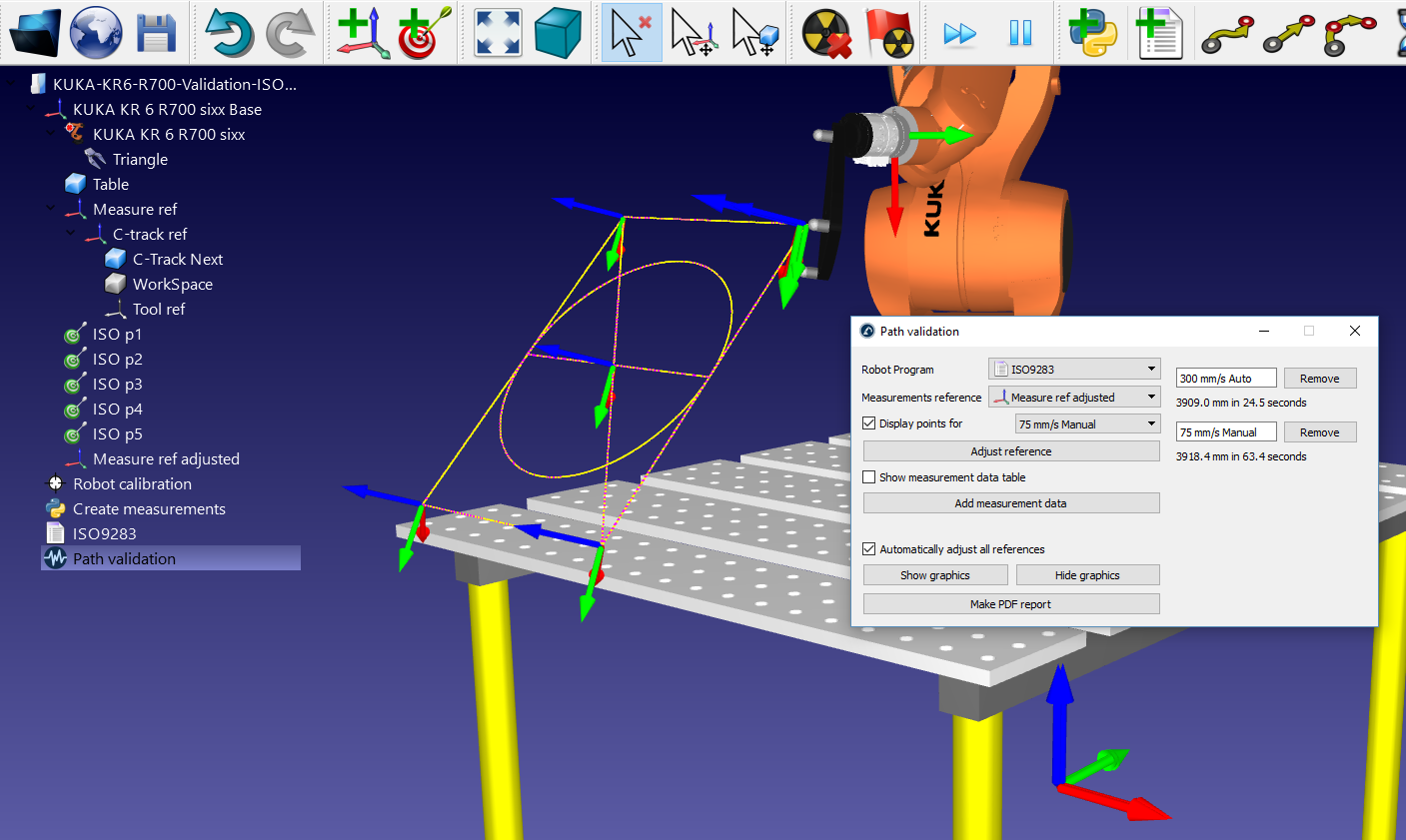
So starten Sie die Pfadvalidierung in RoboDK:
1.Wählen Sie Dienstprogramme➔Pfadgenauigkeit, Geschwindigkeit und Beschleunigung testen (ISO 9283)
2.Wählen Sie das zu validierende Programm aus dem Dropdown-Menü
3.Geben Sie den Referenzrahmen an, der für die Messungen verwendet wird
4.Importieren Sie die Messdaten, indem Sie Messdaten hinzufügen wählen. Alternativ können Sie die CSV- oder TXT-Dateien, die die Messungen enthalten, per Drag & Drop in das Fenster ziehen.
Wählen Sie letztendlichPDF-Bericht erstellen, um ein PDF mit einigen Statistiken und Grafiken über die Pfadgenauigkeit, Geschwindigkeit und Beschleunigung zu generieren. Es ist möglich, denselben Test mehrmals unter verschiedenen Bedingungen (unterschiedliche Geschwindigkeiten, unterschiedliche Werte für Überschleifen, unterschiedliche Nutzlasten, ...) durchzuführen, um diese Parameter im selben Bericht zu vergleichen.
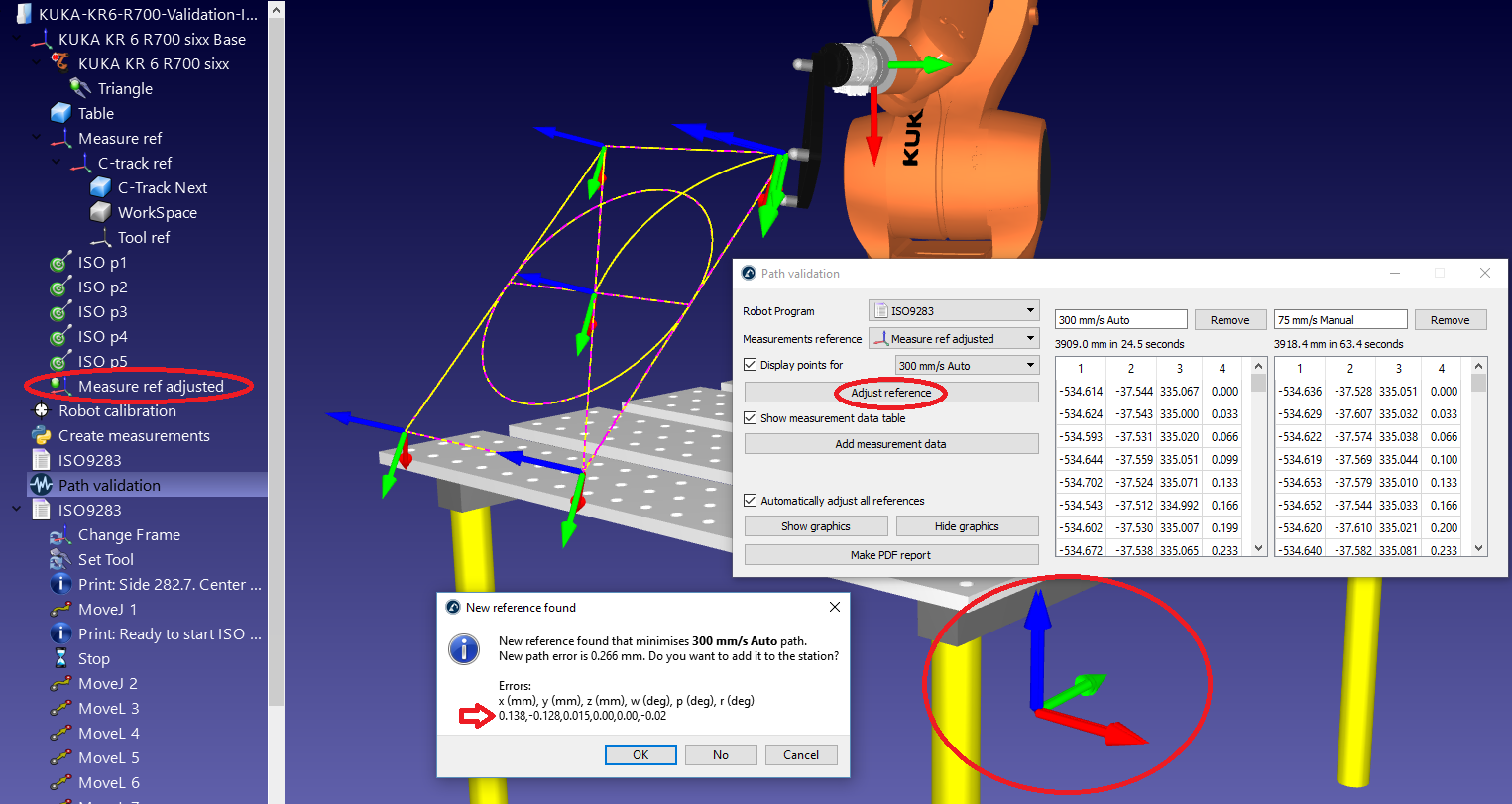
Die Messpunkte können violett dargestellt werden. Diese Messungen sollten mit dem gelben Pfad übereinstimmen, der den idealen Pfad beschreibt, dem der Roboter folgen muss. Die von RoboDK bereitgestellten Statistiken sind die Differenzen zwischen diesen beiden Pfaden.
Wenn der Referenzrahmen nicht richtig definiert wurde, stimmen die Messpunkte nicht mit dem gelben Pfad überein. Dies kann verschiedene Ursachen haben, z.B. eine fehlerhafte Definition des Bezugssystems oder des Werkzeugs. In diesem Fall wird durchReferenz anpassenversucht, die beiden Pfade am besten anzupassen, so dass in der bereitgestellten Statistik die Fehlausrichtungen isoliert werden.