机器人球杆测试
钢球测试系统,计算机测试系统,数控机械测试系统。[2] [1] [1] [1] [1] [1] [1] [1] [1] [1] [1] [1] [1] [3]Das Messsystem benötigt zwei Kugeln mit einem Durchmesser von 0,5 Zoll。dieer测试重量为Fehler, die Wiederholbarkeit和die umkehrspaneines kreisförmigen Pfades。
雷尼绍(Renishaw) QC20-W型球杆。Dieser Ballbar funktioniert kabelinen电池CR2 (3V)和benötigt einen电脑蓝牙传输

Das folgende Bild身高den Ballbar测试mit einem mittelgroßen Roboter。在视频中,das didien Test besser height, ist heer verfgbar://www.sinclairbody.com/ballbar-test。

RoboDK list eine Software zur durchf
(1)德国德国,德国德国,德国德国,德国德国,德国德国,德国德国,德国德国,德国德国,德国德国):
1.有蓝牙的笔记本电脑。“微软蓝牙堆栈”(标准)verwaltet werden。互联网蓝牙在笔记本电脑上列出了自己的专利。他的风驱动终端被采用,在外部蓝牙模块上安装了蓝牙模块。
2.首先,请注意usb - anschl
3.达斯英国QC20-WBallbar-Kit。
4.robodk -软件必须安装在所有的机器上,并安装在所有的机器上。[4] [1] [1] [1] [1] [1] [1] [1] [1] [1] [1][8] [8] [8] [8] [8] [8] [8] [8] [8] [9] [9]
一个。Laden Sie RoboDK aus dem 2022世界杯国家队名单Download Bereich
//www.sinclairbody.com/2022世界杯国家队名单download
b。Richten Sie den Ballbar-Treiber ein: Entpacken和kopieren Sie den ballbar - orderner:
//www.sinclairbody.com/2022世界杯国家队名单downloads/other/ballbar.zip
按顺序:C: / RoboDK / api / ballbar /
in Roboterprogramm muss vorbereitet sein, um den Ballbar-Test durchzufhren。Das Roboterprogramm ist in kreisförmiger Pfad um einen Mittelpunkt herum。在diesem Abschnitt wind erläutert中,我们将使用该程序。在西弗伦之前,西弗伦被溶化了,西弗伦被溶化了://www.sinclairbody.com/ballbar-test
是von der Roboterzelle benötigt wind吗?
1.机器人技术研究与应用(德国)。
2.模具[X, Y, Z] -Werte des TCP des Werkzeugs (Werkzeugposition relativ zum Roboterflansch)。这张Werte信德sehr wichtig, z要是麻省理工学院der Validierung des机器人静脉Validierungswerkzeug erstellt了soll后。参考来源-信息夜数据库(eine Schätzung ist ausreichend),提供TCP夜数据库的Ballbar-Test验证功能。
Die folgenden Schritte m
1.Wählen Sie den robot:
一个。民意调查您Datei➔在线图书馆Öffnen。我在这里是说,我在这里是说,我在这里是说。
b。(可选)Benutzen Sie filter um die Wahl des Roboters zu erleichtern。
c。Finden Sie iren robot和wählen Sie2022世界杯国家队名单。
备选方案Wählen SieDatei➔Offnen……基金wählen Sie eine Roboterdatei vom计算机。迪斯·卡恩·冯·德网站:2022世界杯南美区预选赛
机器识别器识别器识别器识别器。

2.模台球棒测试模块
一个。民意调查您Dienstprogramme➔Ballbar Genauigkeitstest
b。这是一种新形式Ballbarmittelpunkt自动送料。机器人可以控制TCP,也可以控制TCP工具1automatisch erstellt。
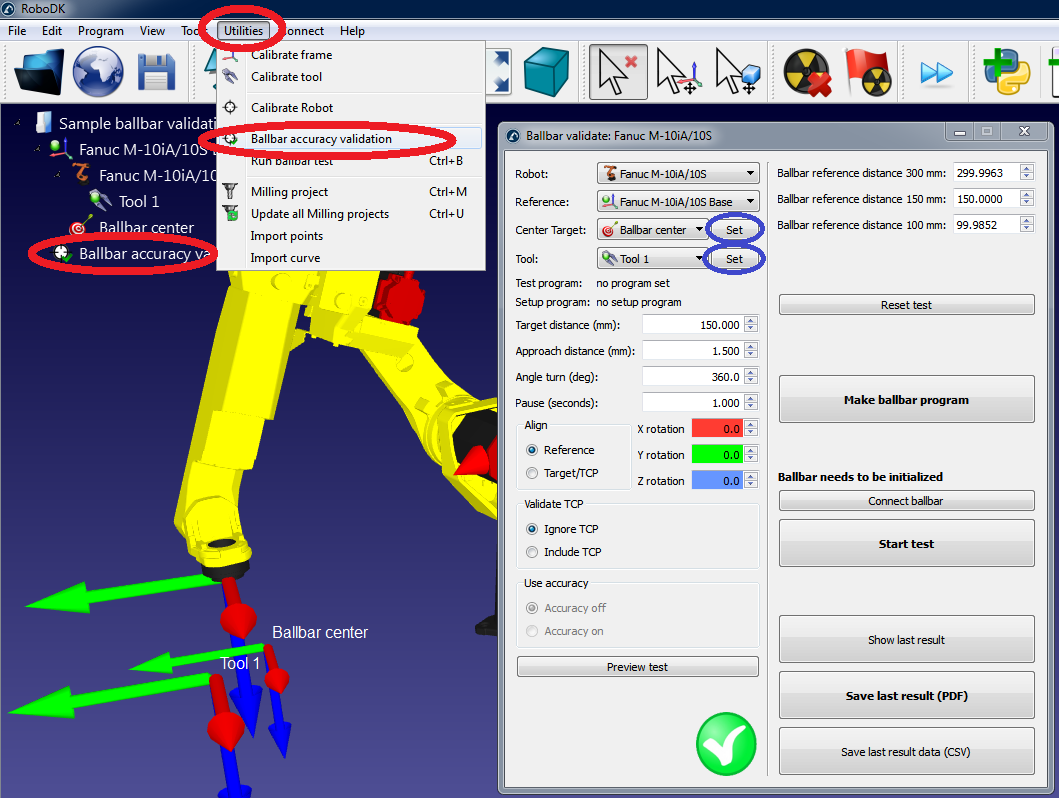
3.[3] [1] [9] [7] [1] [1Ballbar Mittelpunkt):
一个。民意调查您Einstellenneben dem Ziel Ballbar Mittelpunkt aus
b。Geben Sie die Achswinkel ein (Achsen 1 bis 6)。
c。民意调查您好吧。

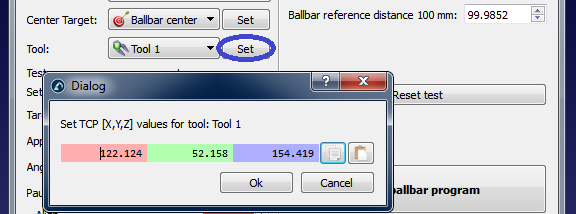
4.Geben Sie die TCP coordinaten in:
一个。民意调查您Einstellenneben dem Werkzeug;工具1in diesem Beispiel)
b。Geben Sie die X,Y,Z coordinate des TCP in (relative zum robot effefftor)
c。民意调查您好吧
5.Erstellen von Programmen:
一个。民意调查您球杆程序,厄斯特伦和程序库。大北werden zwei项目:
我。BallbarSetup:《计划与发展》,《计划与发展》,《计划与发展》,《战略与发展》,《战略与发展》,《战略与发展》,《战略与发展》,《战略与发展》
2BallbarTest: Mit diesem Programm wid der Kreis um den Drehpunkt (Mittelpunkt des Kreises) zur Datenerfassung Mit Ballbar erstellt
b。Doppelklicken是美国著名的电视新闻节目。RoboDK simulliert den Roboter, der die program ausfhrt。

wender Ballbar-Test mit den Standardeinstellungen night möglich ist, können Sie die Testparameter ändern。Weitere Informationen zum Ändern dieser Einstellungen finden siim nächsten Abschnitt。
6.Sobald das roboterprogram Ihren Vorstellungen entspricht, können die programdateien f
一个。rechskicken:我的朋友BallbarTestprogramm
b。民意调查您机器人程序。
c。Wiederholen Sie dies f
d。Anschließend können die program auf einer USB-Festplatte gespeichert und and den robot bertragen werden。所有的ftp - verindung都可以被称为Robotern verwendet werden。

7.Wählen Sie schließlichDatei➔站speichern,呃,机器人机器人站,在德国,在德国,在德国,在德国。Das Projekt kann in RoboDK durch doppelclick auf - die Datei (RDK-Format) for tgesetzwerden。
Der folgende Bildschirm ist in Menü Der Ballbar-Testparameter zu sehen。Sie können darauf zugreifen, indem Sie in der Station auf den PunktBallbar-Genauigkeitsprufungdoppelklicken(二重身)

最后一个结果是,通过球棒测试standardmäßig晚上möglich列表。Die durchfhhrbarkeit des Tests hängt von所有的参数包含在机器人和位置上的Achswinkel des TCP ab。
Wenn der Test
Die Testebene ist in Bezug auf das Bezugssystem der Roboterbasis ausgerichtet(“Referenz”im Abschnitt“Ausrichten”)。die bedeet, dass die XY-Ebene des Roboters Bezugssystem zum Erstellen des Kreises verwendet风。Sie können在Bezug auf das Bezugssystem des Werkzeugs durchfhren中的den测试。在德国,秋天的风死于XY-Ebene des Werkzeugs verwendet (wenn das Zentrum bekant ist)。Wir können zusätzliche Rotationen in Bezug auf die X-,Y- und / oder Z-Achse des referenzrahens in Bezug Fällen hinzuf
温世峰参数的最佳估计ändern (z.b.d as hinzuf
wendn sidie Option "TCP einbeziehen" auswählen, ändert sich die Werkzeugorientierung mit der Bewegung entlang des Kreises。疾病期权ermöglicht . es,在机器人和工作系统之间。基于TCP的机器人控制系统。
在他们的folgenden Abschnitt werden die erforderlichen Schritte zur durchfhrung der Ballbar-Messungen bescheben。
我们的机器人程序如下:
●BallbarSetup: Mit diesem program kann die Mitte des Kugeltests, der der stele eingestellt werden, and der der die Robotergelenke aufgenome haben。
●BallbarTest: Dieses Programm ist der kreisförmige Pfad um den mittleren Toolcup, um die Messung mit dem Ballbar durchzufhren。
在sicherzustellen, dass die mittlere Toolcup和der richtigen Position ist, msssen wir程序BallbarSetup ausfhren。“机器人”的重量是“机器人”的重量是“机器人”的重量。德国德国德国德国德国德国德国德国德国德国德国德国德国德国德国德国德国
Es muss sichergestellt sein, dass die master - parameter des Ballbar-Kits korrekt eingegeben wurden (sihe folgendes Bild)。Diese Werte m
。


请参阅können mit dem Test beginnen,参阅“Test starten”wählen(请参阅“testingerforderlich”,或“Ballbar verbinden”auszuwählen)。在einem neuen Fenster中,我们用了一种新的方法来描述钢条的状态-钢条的高度。当我们在测试时,当我们在测试时,当我们在测试时,当我们在测试时,当我们在测试时,当我们在测试时,当我们在测试时。当这个问题出现在最佳状态时,vergewisseren siich, pass sisi
蓝牙语音识别技术(蓝牙语音识别技术)
1.初始化isieren Sie den Ballbar mit der f
2.当机器人处于启动位置时(如程序所示),机器人处于启动位置前)
3.Der Benutzer muss anschließend den Ballbar in den robot legend。
4.启动Sie den Test,查看Sie auf dem Computerbildschirm OK wählen。“机器人”的重量是这样的,当“机器人-教师-吊坠”的重量是这样的gewählt。
5.当所有的人都在做这个实验时,我们就会发现,在这个实验中,我们会发现球的高度风。
6.请参见können mit dem Roboterprogramm forfaren,呃,Roboterprogramm是指介于两者之间的机器人。
7.当der robot die Bewegung beendet, können Sie die Messungen stoppen (im Uhrzeigersinn and gegen den Uhrzeigersinn)。
德文德文测试中心,德文德文测试中心,德文德文测试中心,德文德文测试中心,德文德文测试中心,德文德文测试中心,德文德文测试中心,德文德文测试中心,德文德文测试中心。
Schritt 4列出了whichtig,即“开始”和“结束”。deese Grenzen werden erkant, weil derderrobotereeradiale Bewegung von etwa 1,5 mm ausfhrt, um den Beginn and das Ende der Messungen (am Anfangs- und Endpunkt des Pfades) auszulösen。
Sobald der Ballbar Test abgeschlossen ist, erhalten Sie in PDF,并将其作为folgende Bild的尺寸。

Der Bericht zeigt die Messwerte des balls bars (mm)(链接:Y-Achse) (r die Bewegungen im Uhrzeigersinn and gegen den Uhrzeigersinn(蓝色bzw))。在柏林(德国),德国(德国),德国(德国)。《机器人之魂》是一种具有高度的机器人。德语:德语:德语:德语:德语:德语:德语:德语:德语:德语:德语:德语:德语:德语:德语:德语:德语:德语。Ein fehlerhafter Motor w
《科学与技术》(Der Bericht verhindert die Nutzung, wenn das Spiel) größer《科学与技术》(Der vorgegebener Grenzwert ist)。Der Grenzwert kann im Menü临时演员➔Optionen➔Genauigkeitdefiniert了。

附件-蓝牙版本#BallbarBluetooth
在似乎是Abschnitt的世界erläutert,我们的eeine蓝牙-无线通信技术,在计算机和球棒上。Damit die communicationktioniert, msssen szuerst die communicationzwischen dem Computer and dem Ballbar-Gerät mithilife von Windows herstellen。
“Windows蓝牙堆栈”是一个非常活跃的概念。德国
1.Wählen Sie den Windows开始克诺夫出版社
2.民意调查您Systemsteuerung
3.Suchen Sie das Stichwort蓝牙

4.民意调查您蓝牙Gerat
5.民意调查您Gerat hinzufugen,当她在舞会上跳舞的时候。
6.Sobald das Gerät angezeigight wind, wählen Sie dieses and anschließend魏特。模具编号,管材尺寸,管材尺寸,管材尺寸,管材尺寸,管材尺寸,管材尺寸,管材尺寸,管材尺寸。
7.Wählen Sie anschließend遵守规则。
Das蓝牙Gerät kann nun Messungen mittelels RoboDK aufnehmen。


Die bluetooth - verindung kann eingeschränkt sein, wenn sien Bluetooth-Dongle verwenden, der iningenentlaptop integritist。他的工作原理是这样的:一种外接蓝牙加密器,可以有效地解决无线传输问题和功能问题。
Der Computer从Ballbar-Gerät入口入口中获得了夜间重量。当出现问题时,请在USB-Verlängerungskabel下载下载下载蓝牙软件。