Roboter CNC
Der Werkzeug – Bahn Abstand ermöglicht das Ändern der bevorzugten Ausrichtung des Werkzeugs entlang der Werkzeugbahn. Diese Option wird hauptsächlich verwendet, um das Werkzeug um die Z-Achse des TCP zu drehen.
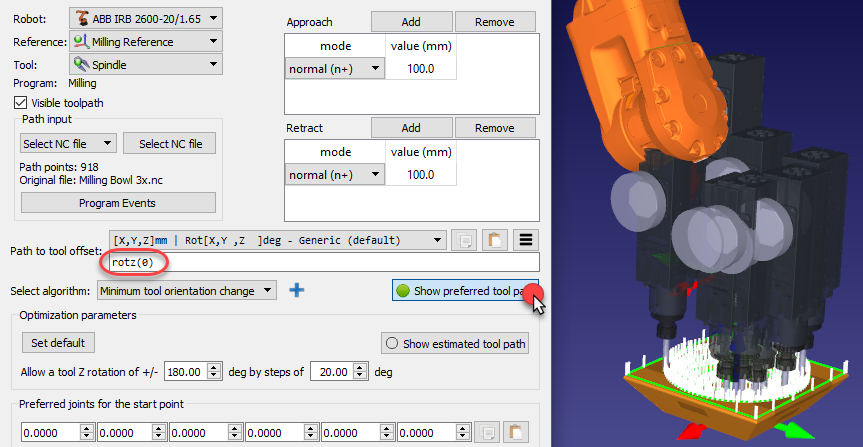
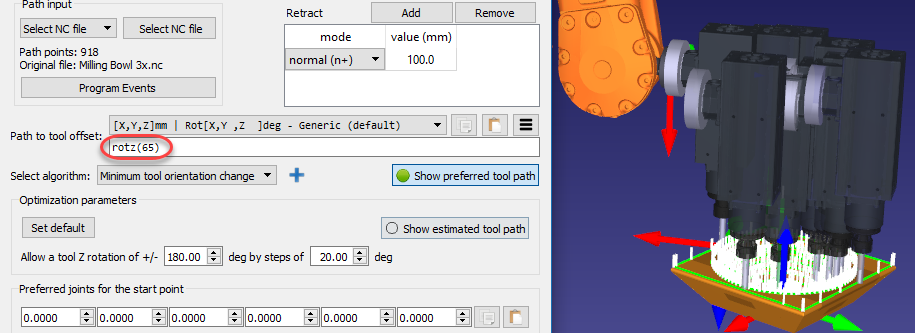
Standardmäßig zeigt der Werkzeug – Bahn Abstand einerotz(0)Transformation an. Dieser Wert kann geändert werden, um die bevorzugte Ausrichtung des Werkzeugs festzulegen. Dabei wird die Ausrichtung um die Z-Achse des TCP oder in Kombination mit anderen Achsen geändert. Die bevorzugte Ausrichtung ist die Ausrichtung, die der Roboter zu halten versucht, während er dem Werkzeugweg folgt.
RoboDK verwendet standardmäßig den Algorithmus derminimalen Änderung der Werkzeugorientierung. Dies bedeutet, dass die Ausrichtung des Werkzeugs entlang des Werkzeugweges so konstant wie möglich gehalten wird. Im Allgemeinen ist diese Option für Fräsoperationen geeignet, da sie die Robotergelenkbewegungen minimiert. Alternativ stehen andere Algorithmen / Methoden zur Verfügung, z. B. dieWerkzeugausrichtung anhand der Werkzeugbahn(nützlich für Schneidanwendungen) oderRoboter hält Objekt, wenn die Werkzeugbahn mit dem Roboterwerkzeug verknüpft werden muss (z. B. zum Dosieren oder Polieren).