Roboter CNC
In diesem Kapitel wird erklärt, wie Sie eine simple RoboDK-Station für die Roboterbearbeitung offline vorbereiten. Eine RoboDK-Station enthält alle Roboter, Werkzeuge, Referenzrahmen, Objekte, sowie sämtliche Einstellungen. Weitere Informationen zum Erstellen einer RoboDK-Station finden Sie im AbschnittErsteSchritte.
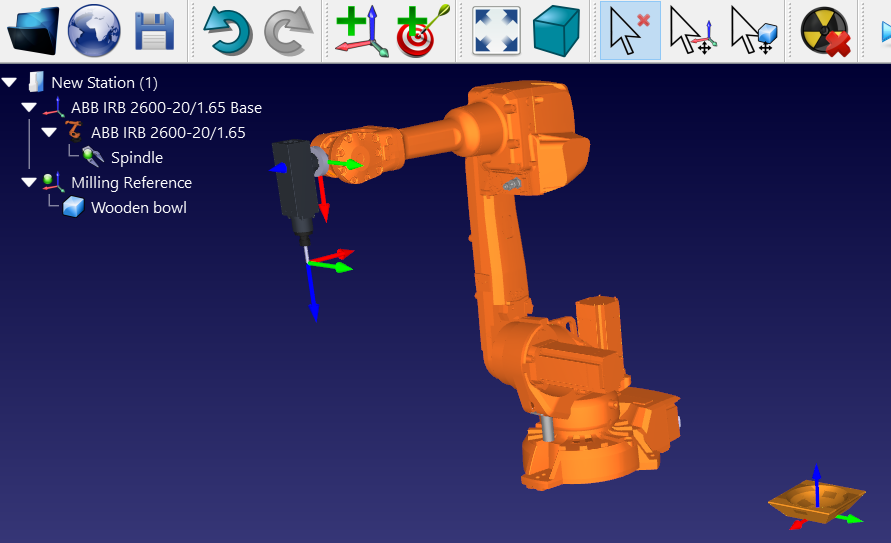
Es ist erforderlich, einen Roboter mit einem Werkzeug für die maschinelle Bearbeitung einzurichten. Das 3D Objekt muss dabei in einem eigenen Bezugssystem sein:
1-Wählen Sie einen Roboter:
a.Wählen SieDatei➔![]() Online Bibliothek öffnen
Online Bibliothek öffnen
b.Verwenden Sie Filter um Ihren Roboter nach Marke, Nutzlast, ... zu suchen und zu finden
Wählen Sie zum Beispiel den ABB IRB 2600-20 / 1.65 (20 kg Nutzlast, 1,65 m Reichweite).
c.Wählen SieDownload.Der Roboter erscheint automatisch auf dem Hauptbildschirm.
2-Wählen Sie ein Werkzeug:
a.Ebenfalls aus der Online Bibliothek; filtern Sie nachTyp➔Tool
b.Laden Sie das Spindel Werkzeug herunter
c.Das Werkzeug sollte automatisch am Roboter angebracht werden
Sobald das Werkzeug geladen ist, kann dieOnline-Bibliothekgeschlossen werden
3-Fügen Sie ein Bezugssystem hinzu
a.Wählen SieProgramm➔![]() Bezugssystem hinzufügen
Bezugssystem hinzufügen
b.Wählen Sie das neue Bezugssystem in der Baumstruktur und verwenden Sie F2, um ihn inFräsreferenzumzubenennen
4-Fügen Sie ein Objekt hinzu:
a.Wählen SieDatei➔![]() Öffnen
Öffnen
b.Wählen Sie das Objekt mit dem NamenObject wooden bowl.sld
c.Ziehen Sie das Objekt per Drag & Drop auf die Fräsrenferenz (im Stationsbaum)