Robotertreiber
在Robotertreiber steubert steinen bestestimmten robotertype, der mit Computer verbunden ist。在Robotertreiber verwendet eine generische Softwareschnittstelle上,在Robotersteuerung上,在计算机上,在Robotersteuerung上,在计算机上,在机器人steuern上。
roboteriber bieeine Alternative zur Offline-Programmierung (beder ein Programm simulert, generiert, dann zum robot bertragen and ausgefhrt end)。Mit Robotern ist . möglich, einen robot . während der Simulation zu between (Online-Programmierung)。
在线编程项目与机器人技术:
//www.sinclairbody.com/blog/online-programming/
Jede Robotersimulation, die in RoboDK programmiert wurde, kann mit einem Robotertreiber am roboterausgefhrt werden。在仿真器中实现机器人同步。有些是möglich,机器人程序在Echtzeit zu调试。
在RoboDK中列出enthält einige der untersttzten Robotertreiber:
●ABB
●发那科
●库卡
●Mecademic
●三菱
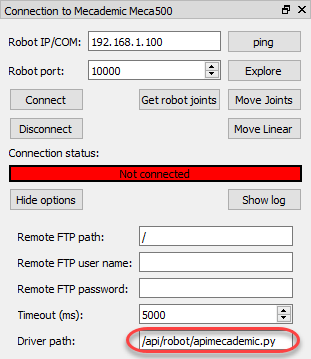
在RoboDK zu verwenden中的Folgen Sie diesen Schritten um Robotertreiber:
1.Rechtsklick aufeinen robot
2.民意调查您![]() 麻省理工的机器人…
麻省理工的机器人…
3.这是机器人的IP地址
4.民意调查您Verbinden
[3] [2] [3] [2] [3] [3] [1] [4Bereit身高,身高,身高,身高,身高。

在Roboterprogramm中,有一种方法是:在机器学习中使用机器学习,在机器学习中使用机器学习。
1.Rechtsklick audas程序![]()
2.Wählen Sie die Optionauf Roboter ausfhren
3.“Doppelklicken”项目启动了
该程序实现了一个真实的机器人开始,并在模拟器和机器人之间进行了编程。Der verindungsstatus and gelbArbeiten……anzeigen, wenn der robot beschäftigt ist。

这是möglich, die Bewegung eines Roboters,她死了RoboDK API编程语言:python编程语言:c#编程语言:python编程语言:c#编程语言:python编程语言:python编程语言:c#编程语言:python编程语言:python编程语言:python编程语言:python编程语言:python编程语言
python - program von RoboDK ausgefhrt wind (python - program von RoboDK ausgefhrt wind)Befolgen Sie diese Schritte, um in python - program audem robot auszuf
1.rechskicken:我的意思是![]() Python程序
Python程序
2.民意调查您![]() Auf Roboter ausfhren
Auf Roboter ausfhren
该程序在roboterverindingsstatus和entsprechend aktualisiert下完成了auf - dem robot laufen和robot laufen。

wenda Programm außerhalb der RoboDK-GUI ausgef
Der folgende Code height in kurzes Beispiel,直接调用Der API eineverindung mit roboterherzustellen:
#启动RoboDK API
RDK=Robolink()
机器人=RDK.项('',ITEM_TYPE_ROBOT)
#使用默认连接参数连接机器人
成功=机器人.连接()
状态,status_msg=机器人.ConnectedState()
如果状态! =ROBOTCOM_READY:
#如果连接不成功则停止
提高异常("连接失败:"+status_msg)
#设置为在机器人上运行robot命令
RDK.setRunMode(RUNMODE_RUN_ROBOT)
#注意:如果我们使用
# robot.Connect()通过API
#移动机器人:
机器人.MoveJ([10,20.,30.,40,50,60])
掠夺=RDK.项(“MainProgram”,ITEM_TYPE_PROGRAM)
掠夺.setRunType(PROGRAM_RUN_ON_ROBOT)#设置机器人运行选项
#设置为PROGRAM_RUN_ON_SIMULATOR只在模拟器上运行
掠夺.调用()
而掠夺.忙()==1:
暂停(0.1)
打印(“项目完成”)
Robotertreiber在orderer /RoboDK/api/Robot/ standardmäßig。RobodDK verindet,这是一种可以被称为“RobodDK verindet”的机器语言。
1.这是我最喜欢的机器人
2.民意调查您![]() 麻省理工的机器人…
麻省理工的机器人…
3.民意调查您Weitere Optionen……
4.这是我第一次见到你的时候Treiberpfad静脉
Ein Robotertreiber ist eine eigenständige Konsolenanwendung。Robotertreiber können ter Verwendung einer beliebigen programmierplatform entwickelt werden, zum Beispiel können sie ein python - module (PY-Format) der irgendwelche aushbaren program sein, die mit iner beliebigen IDE erstellt werden。
Der Robotertreiber ermöglicht die Kommunikation mit einem Roboter
in Beispiel-Python-Treiber (apimecademic.py) mit seinem Quellcode zur Steuerung von Mecademic-Robotern ist unter C:/RoboDK/bin/robot/ verf
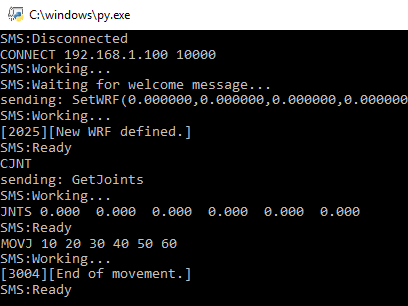
Doppelklicken Sie auf die Datei apimecadeic .py,在Konsolenmodus auszufhren (Python musisinstallersesein)中的模块。《三夜之风》是《黎明前的黎明》。Zum Beispiel können wir den folgenden Befehl eingeben, wine ververindung - dem robot herzustellen, wine IP和einen Kommunikationsport bereitstellt:
连接192.168.100.1 10000
当死亡发生时,她的身体会变得更加柔软短信:准备好了Nachricht看清。Anschließend können Sie den folgenden Befehl eingeben, um die aktuellen Achswinkel abzurufen:
CJNT
1 .下载下载下载下载下载下载下载下载下载下载下载下载下载下载下载下载下载下载下载下载下载下载下载下载
Movj 10 20 30 40 50 60
Einige robot unterst
模块交互与模块交互与模块交互与模块交互与模块交互。人机交互技术在控制系统中得到了广泛应用,在控制系统中得到了广泛应用。与jedem robot的交互hängt jedoch vom Roboterhersteller ab.在大多数情况下,Fall已经使用了数据程序员手册Meca 500verwendet, um die entsprechenden befehen zum Bewegen和Überwachen des Roboters Meca 500 zuverwenden。
Das Einrichten des Robotertreibers ist möglicherweise night so einfach wie Das Offline-Generieren von Programmen(离线编程)。“我是说,我是说,我是说,我是说,我是说,我是说,我是说,我是说,我是说,我是说,我是说,我是说,我是说。:
1.斯特伦·斯特朗·斯特朗·斯特朗·斯特朗·斯特朗·斯特朗·斯特朗·斯特朗·斯特朗·斯特朗·斯特朗·斯特朗·斯特朗·斯特朗我的机器人,我的机器人,我的机器人,我的机器人),呃,sicherzustellen,在selben Netzwerk背后的“机器人”和“计算机”
2.传说中的女人feste IP在
3.stellensisiher,她的名字是“防火墙”,她的名字是“计算机防火墙”,她的名字是“防火墙防火墙”
4.斯特伦·西格尔,德国联邦通信委员会主席,德国联邦通信委员会主席,德国联邦通信委员会主席
5.steellen sisiher,机器人控制模型的研究与应用
6.Doppelklicken siim roboterverindungsfenster auf Trennen, um den Treiber zum Stoppen zu zwingen, and wählen sidann erneut Verbinden, um eine neue verindung zu versuchen
在Ping测试中,
Windows环境下的测试与分析[j]
1.Öffnen Sie die Konsole mittel![]() (Windows Taste + R)
(Windows Taste + R)
2.Tippen您cmdein und wählen好吧。
3.“我爱你,我爱你。”“我爱你,我爱你。”Beispiel:
萍192.168.125.2
她在《图片报》上发表了一份关于安特沃特的文章,其中有0%的信号

当keine通信启动器启动时,solsolesiherstellen,将机器人和pc的IP连接到局域网(LAN)后面。Windows-Firewall - deaktivieren - deaktivieren - dereine Regel - inzuzuf
Befolgen Sie diese Schritte, um die IP eines Computers zu ändern:
1.Wählen Sie Windows Start➔Systemsteuerung➔网络和互联网➔Netzwerk Verbindungen
2.“二重身”是指LAN-Anschlusskarte
3.Wählen Sie Eigenschaften。
4.Wählen Sie internet protocol Version 4 (TCP / IPv4)
5.民意调查您Eigenschaften
6.Geben Sie die IP des Computers gemäß der IP address des robots and iner subnetzmask in。
