Robot Calibration (Laser Tracker)
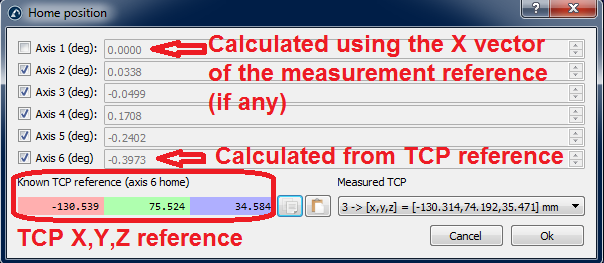
Sie müssen besonders aufpassen, wenn Sie die Mastering/Home-Werte für die Achsen 1 und 6 wiederherstellen wollen. Diese Werte beziehen sich direkt auf die Roboterbasis für die Achse 1 und eine TCP-Referenz für die Achse 6. Daher müssen externe Messungen durchgeführt werden um diese Werte richtig einzustellen. Dieses Fenster erscheint nach Auswahl von "Mastering-Programm erstellen" im Kalibrierungsmenü.
Die nächsten zwei Prozeduren müssen befolgt werden, um die Mastering-Parameter für diese beiden Achsen richtig einzustellen.
Sie müssen ein Referenzziel verwenden, um die "Home" -Position von Achse 6 richtig einzustellen. Der Winkelversatz ist die Drehung um die Z-Achse des Werkzeugflansches. Dieser wird benötigt, um den gemessenen TCP (X, Y, Z) mit der bekannten TCP-Referenz. Der gemessene TCP (siehe folgendes Bild) ist einer der TCPs, der im zweiten Schritt des Kalibrierungsverfahrens gemessen wurden. Der Referenz-TCP ist eine bekannte Referenz, die einem der TCP für das verwendete Kalibrierungswerkzeug entspricht.
Idealerweise吵架der Referenz-TCP CMM在Bezu生效g auf den Werkzeugflansch gemessen werden (eine Kopie des Roboterwerkzeugflansches wäre am besten). Alternativ können Sie einen neuen Roboter verwenden, um den TCP erstmalig zu messen (Schritt zwei des Kalibrierungsverfahrens) und einen gemessenen TCP als Referenz zu verwenden. Es ist wichtig, einen Passstift und/oder eine entsprechende Werkzeugflanschreferenzierung zu verwenden, um sicherzustellen, dass sich der Endeffektor immer an der gleichen Position befindet.

Bevor Sie eine Roboterkalibrierung starten, müssen Sie drei Basisziele richtig messen, wenn Sie die Achse 1 mit dem realen Robotergrundrahmen ausrichten wollen. Diese Basisziele müssen so gewählt werden, dass das Bezugssystem in Bezug auf den Roboter gefunden werden kann.
Die "Home" -Position von Achse 1 hängt direkt von den drei Basiszielen sowie der Robotergrundeinstellung ab. Das Einrichten der Roboterbasis ist der erste Kalibrierungsschritt. Bei diesem wird das Basis Bezugssystem des Messsystems durch Bewegen und Messen der Achsen 1 und 2 in Bezug auf das Bezuggsystem der Roboterbasis platziert.
Die Basisziele des Messsystems können durch Verwenden von "Basisziele setzen" eingestellt werden (siehe folgendes Bild). Dies sind 3 Messungen, die das gewünschte Roboter Bezugssystem definieren (die ersten 2 Messungen definieren die X-Achse und der dritte Punkt die positive Y-Achse). Sie sollten geeignete Referenzpunkte für die Roboterbasis verwenden, damit diese Prozedur wiederholbar ist.
Der Korrekturwinkel für Gelenk 1 ist der Winkel zwischen der X-Achse der Basisreferenz, die durch 3 Punkte gemessen wird, und der Basisreferenz, die durch Bewegen der Roboterachsen 1 und 2 gemessen wird. Natürlich werden beide Vektoren vorher auf die XY-Ebene der Basisreferenz projiziert, die durch Berühren der Baumpunkte erhalten wird
