Robot Calibration (Optical CMM)
Es werden zwei Modelle benötigt: ein Modell des Werkzeugs und ein Modell des Basis Bezugssystem. Ein Modell ist ein Objekt, das als eine Liste von Punkten (X-, Y-, Z-Koordinaten) definiert ist. Diese entsprechen den Zielen in Bezug auf die Modellreferenz (Werkzeug- oder Basis Bezugssystem). Sie können optional die HandyProbe verwenden, um das Bezugssystem wie gewünscht zu platzieren.
Sie müssen diese Schritte zweimal ausführen, um das Werkzeug und die Basismodelle zu definieren:
1.Starten Sie VXelements und verbinden Sie den Tracker. Kalibrieren Sie den Tracker sowie die HandyProbe bei Bedarf.
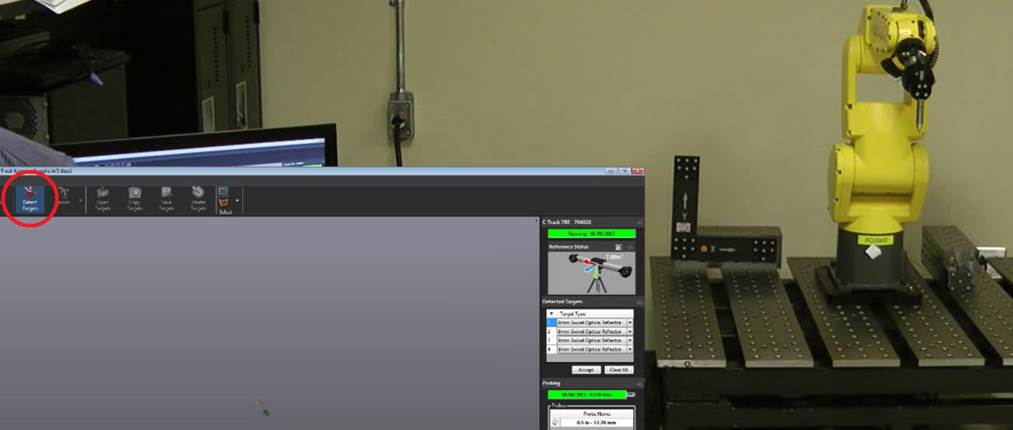
2.Wählen SieTracking Modellsin der linken Baumstruktur von VXelements aus und wählen SieDetect Model. Wählen Sie die Ziele aus, die einem Modell (Werkzeug oder Objekt) entsprechen, und wählen Sie "Accpet”.
Tip: Halten Sie STRG gedrückt, um eine Gruppe von Zielen auszuwählen.
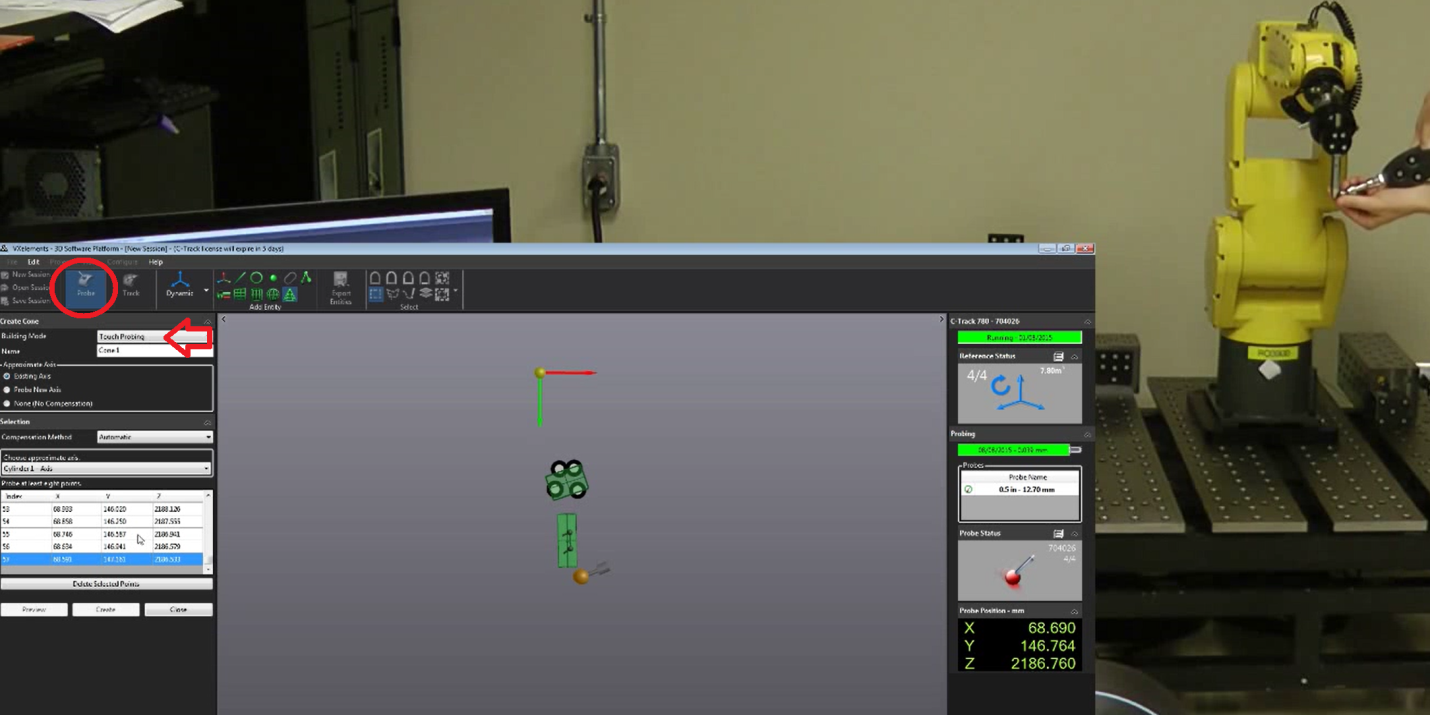
3.Das Bezugssystem des Objekts kann in Bezug auf bestimmte Merkmale des Objekts an einer bestimmten Position platziert werden. Dieser Schritt ist optional, wird jedoch dringend empfohlen, wenn der TCP in Bezug auf den Roboterflansch genau platziert werden müssen. Zum Beispiel könnten Sie die Z-Achse des Werkzeugs genau entlang eines Zylinders platzieren, der als Spindelachse verwendet wird.
Um das Bezugssystem des Objekts richtig zu verschieben, müssen Sie die HandyProbe verwenden und diese „Features“ in die virtuelle VXelements-Sitzung bringen. Das verwendete Modell muss als Positionierungsmodell definiert werden, damit die Features in Bezug auf dieses Modell geprüft werden. Es ist möglich, Punkte, Linien, Ebenen, Zylinder, Kegel zu untersuchen und Bezugssystem in Bezug auf diese Merkmale zu definieren
Wenn Sie fertig sind, können Sie das Modell als TXT-Datei exportieren. Sie sollten die Ziele in der Textdatei als eine Liste von XYZ-Punkten sehen.