RoboDK API
Die RoboDK- api(应用程序接口)list eine Reihe von Abläufen und Befehlen, Die RoboDK
Im Gegensatz zur herstellerspezifischen roboterprogrammimiung kanmitder RoboDK-API jder roboterprogrammimider通用编程语言Python仿真和编程语言。Die haupseite bietet einen Überblick and in Video zur离线编程管理API。
Die RoboDK-API ist使用Python, c#和Matlab verf
Die RoboDK API kann f
1.自动化模具仿真:Erstellen Sie Makros, um best - estimestimaufgaben RoboDK-Simulator zu Automatisieren, z.B.加权对象,参考对象和机器人。
2.脱机编程:机器人脱机编程:机器人脱机编程。RoboDK erzeugt spezifische program fgr . exe . exe . exe . exe . exe . exe . exe . exe . exe . exe . exe。Das Roboterprogramm and entsprechend dem
3.online - programmierung: robot online mit iner universsellen Programmiersprache programmieren: Es ist möglich, robot zu between and the aktuelle Position der RoboDK-API abzurufen。RoboDK是我的最爱,RoboDK是我的最爱Robotertreibern。Der Abschnitt在线Python编程参见文件enthält weitere Informationen and Beispiele。
(1)计算机仿真,(1)计算机仿真,(2)计算机仿真,(3)计算机仿真,(3)计算机仿真。
处理后的文件:
●死Python APImit Beispielen
●死c# APImit Beispielen
●死Matlab APISimulink-Beispiel f
●死Befehlszeilenzum启动冯RoboDK
提示:访问RoboDK APIGitHub上的RoboDK API存储库获取最新版本
。
Python列表中包含了verbreititprogrammierspachs,并包含了scheller和i3系统之间的有效集成können。Python语法:Python语法:Python语法:Python语法:Python语法:Python语法:Python语法:Python语法:Python语法:Python语法
即时通讯vorherigenAbschnittverteile / Verwendung / RoboDK-API / verbreiteten Programmiersprache / verbreiteten programmierung / Python erläutert。
Python wind自动安装和standardmäßig在RoboDK集成。Wählen Sie Extras➔Optionen➔安德利果汁, um die Standardeinstellungen (Python-Speicherort和Python-Editor) zu ändern。

Die RoboDK-API
●达斯Robolink模块(robolink.py):达斯Robolink-模块主义者die Schnittstelle zwischen RoboDK和Python。jedesobjekt in der robodk - stationsstruckturr konkonm Robolink-Objekt abgerufen werden and wind durch in元素reprasentiert。Abhängig von der Robolink object - klasse können verschiedene Operationen f
●达斯robodk模块(robodk.py):达斯robodk-模块学家eine Robotik-Toolbox fr Python, die es ermöglicht, mit Transformationen zu arbeen和Euler-Winkel fr verschiedene Roboterhersteller zu erhalten。所有的后prozesssoren和von diesemrobodk模件abhangig。
Die Python- module in order C:/RoboDK/Python/ und werden automatisch inden Python-Ordner kopiert, sobald RoboDK安装在order中Standard-Python-Einstellungen festlegenausgewählt ist (siehe vorheriges Bild)。
[3] [j] .计算机仿真与仿真,计算机仿真与仿真,计算机仿真与仿真[j]。Online-Programmierung erstellen。Weitere Beispiele finden Sie auf der SeitePython API f
德国德国德国德国德国德国德国德国德国德国德国德国德国德国德国德国德国德国德国德国德国
1.民意调查您Datei➔![]() Offnen
Offnen
2.Öffnen好吧UR10机器人
3.民意调查您Datei➔![]() Offnen
Offnen
4.Öffnen死亡日期Paint_gun.tool
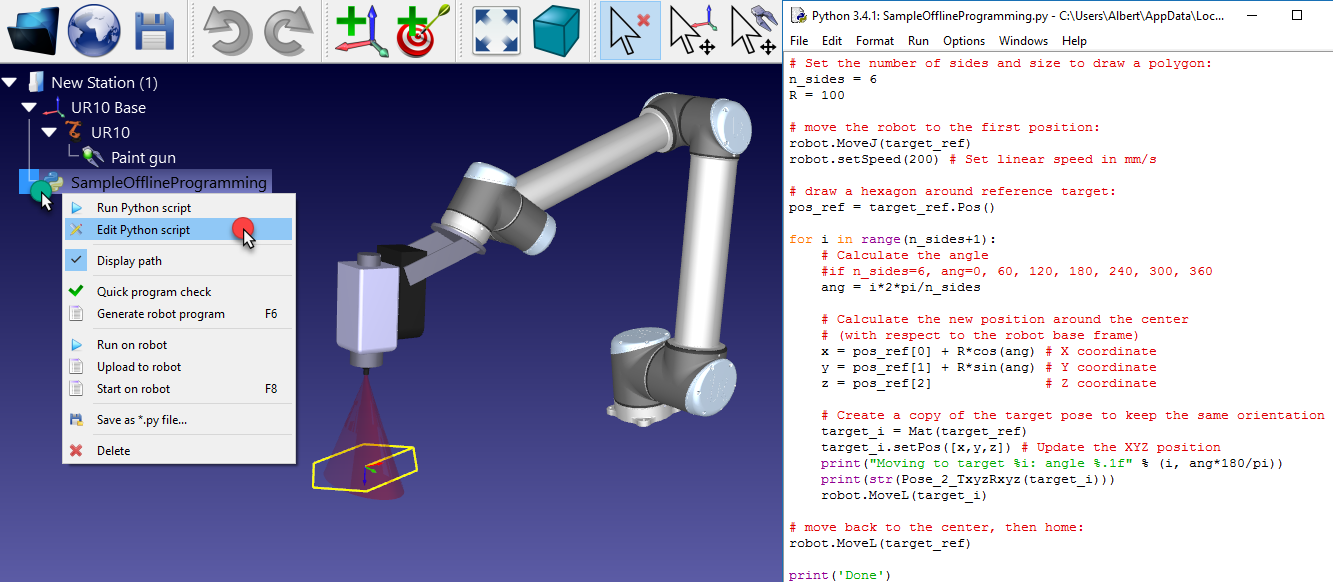
5.Öffnen Sie anschließend das beispiel - python - programSampleOfflineProgramming.py冯·C: / RoboDK /图书馆/宏/
6.“二重身”是指她的父亲SampleOfflineProgrammierung,模具仿真auszuf
可选选项为:Sie . net . net . net . net . net . net . net . net![]() Python-Skript ausfuhren来自。
Python-Skript ausfuhren来自。
7.Klicken说:“这是我最喜欢的元素。![]() SampleOfflineProgrammierung,以及wählenPython-Skript bearbeiten来自。这是一项伟大的计划。
SampleOfflineProgrammierung,以及wählenPython-Skript bearbeiten来自。这是一项伟大的计划。
Makro SampleOfflineProgrammierung zeichnet in Polygon mitn_Seiten和民主党半径在机器人bezugg系统中机器人的位置。机器人研究与发展,ändern机器人研究与发展与发展,机器人研究与发展,机器人研究与发展。
Dieses Beispiel ähnelt dem程序,das im Abschnitt离线Programmierung网站angezeigight wind(视频焓值)。
python - program können offline mit demselben Python-Code genergenerert werden, der zur Simulation des Roboters verwendet wurde (wie im vorherigen Abschnitt)Python模拟gezeigt)。离线- programmierung ermöglicht das Generieren von Roboterprogrammen, die auf einer Robotersteuerung ausgef
1.“我的朋友,”他说![]() Python程序
Python程序
2.民意调查您Roboterprogramm generieren(F6)
在deem秋天的风的程序夜间模拟,现代schnell ausgefhrt, um的Ergebnis zu erhalten: In Roboterprogramm, das fereine Robotersteuerung spezifisch ist。
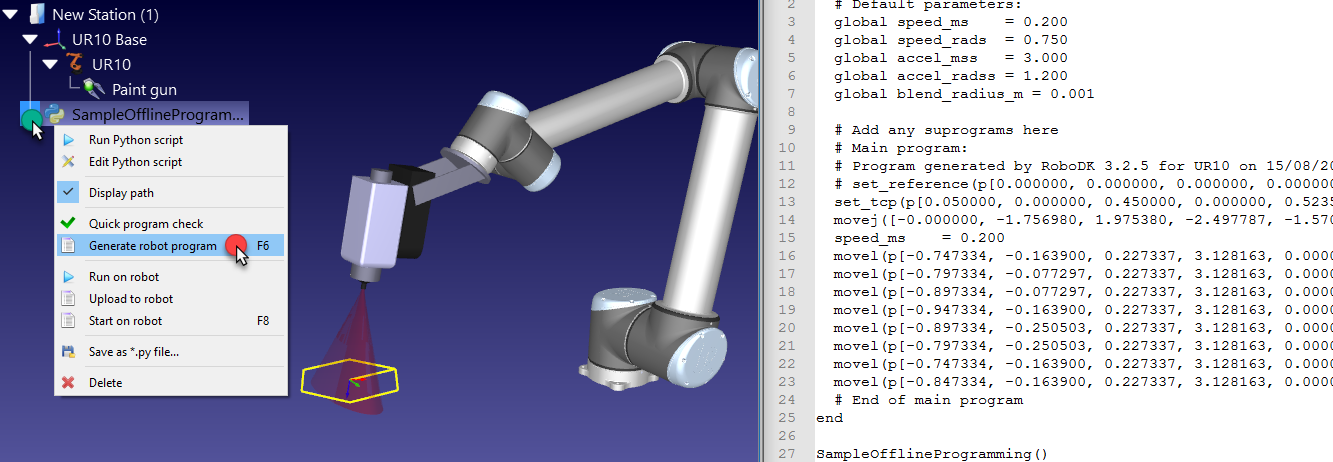
RDK = Robolink()
RDK.setRunMode (RUNMODE_MAKE_ROBOTPROG)
python - program können direckt auf dem Roboter mit dem gleichen Python-Code ausgefhrt werden, der zur Simulation des Roboters verwendet wurde (bereits in der .Pythonsimulationgezeigt)。Die Online-Programmierung ermöglicht das ausf
1.她的名字叫“我的名字”,叫“我的名字”![]() Python-Programm
Python-Programm
2.民意调查您Auf Roboter ausfhren
Das Programm wird auf dem robot ausgefhrt, während Das Python-Programm ausgefhrt wirt。
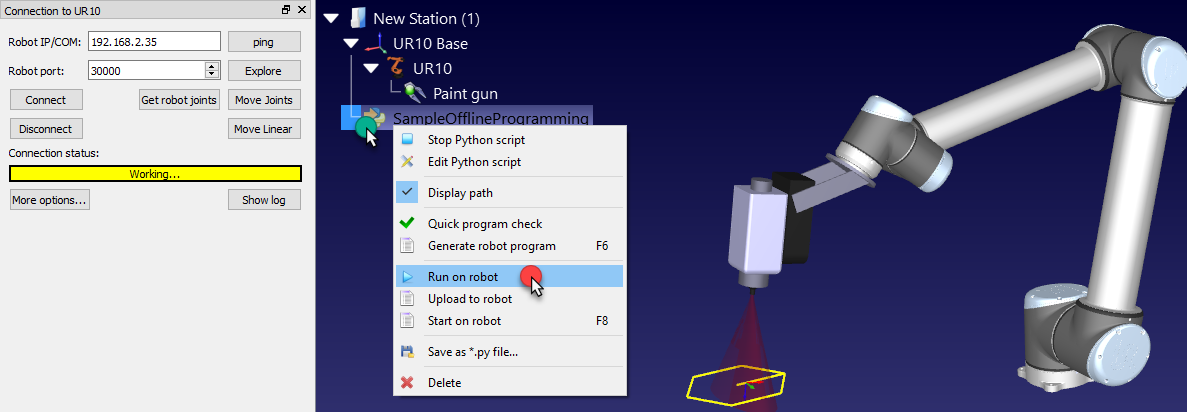
RDK = Robolink()
RDK.setRunMode (RUNMODE_RUN_ROBOT)
c#是由微软开发的,是由微软开发的,是由微软开发的,是由微软开发的,是由微软开发的,是由微软开发的,是由微软开发的,是由微软开发的,是由。net框架开发的,是由微软开发的。c#列表中包含了infach、leistungsfähig、typsicher和objecktorientiert。
即时通讯Hauptteil3 .文档werden die Vorteile der Verwendung der RoboDK-API mit werden weit verbreiteten Programmiersprache and c# fr die Roboterprogrammierung erläutert。
# # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # #Robolink——克拉斯·冯·派森),死的RoboDK。项-Klasse (ähnlich der Python-API-KlasseRobolink。项) and andere Tools f
c#编程语言编程语言编程语言编程语言编程语言编程语言编程语言编程语言,编程语言编程语言编程语言(编程语言)编程语言编程语言。
民意调查您Datei拉登,呃eine RoboDK- station oder eine andere von RoboDK unterst
c# - beispielprojects与RoboDK-API:
https://www.youtube.com/watch?v=1hRRYr9bEsY
提示:这个c#示例的最新版本是可以在这里。
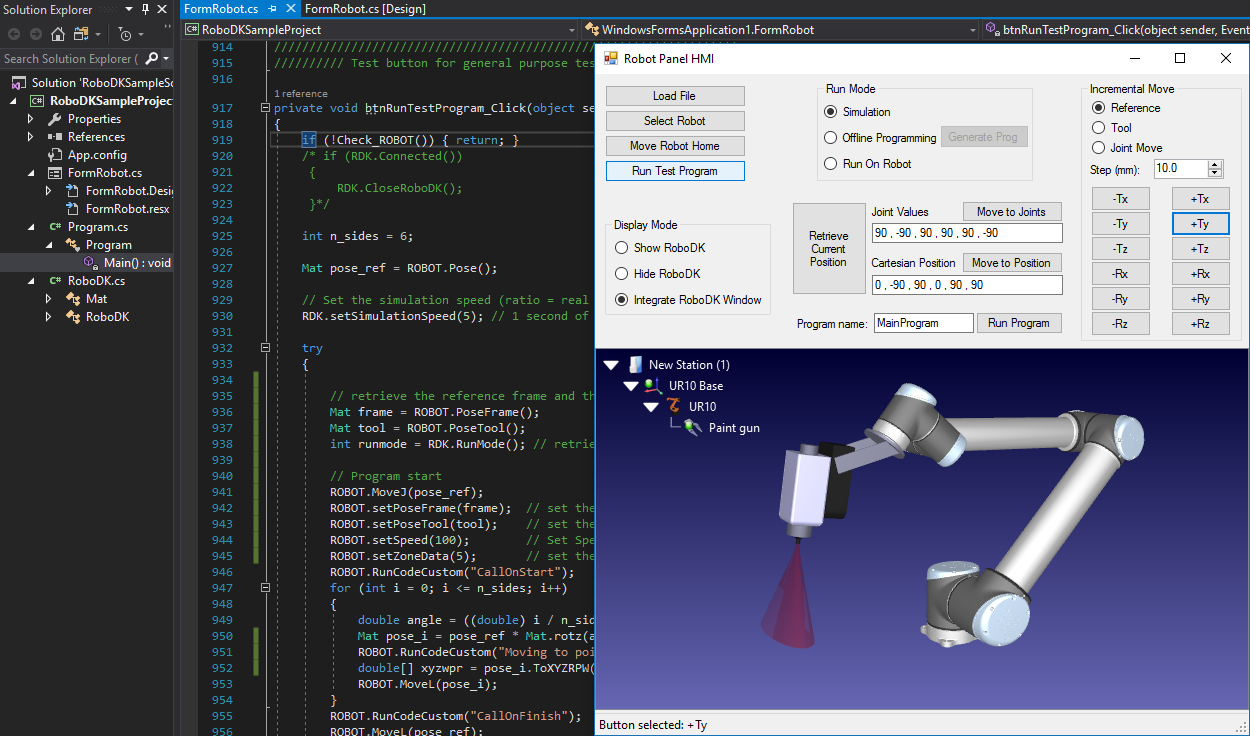
c#程序werden standardmäßig simulliert, wenn Roboterbefehle verwendet werden (z.b.m evej, MoveL odersetdo)。当使用Beispiel c# Projekt时,可以使用jquery jquery jquery standardmäßig或Simulationsmodus ausgewählt。
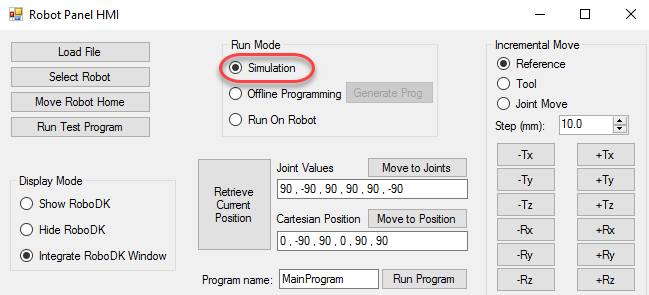
die bedeutet, dass die Roboterbewegungen in RoboDK simulliert werden。Zum Beispiel können Sie den robot in Schritten von 10mm之间,indem Sie die Schaltflächen rechts verwenden (+ Tx, -Tx,…)。
[4] [1] [1] [1] [1] [1] [1] [1] [1] [1] [4]Roboterziele können as Achswinkel oder mattervariable (4x4 -Matrizen) definient和als XYZWPR-Format zur Fehlerbehebung von programproblemen untersucht werden。Weitere Informationen zu Bezugssystemen finden siim AbschnittBezugssysteme。
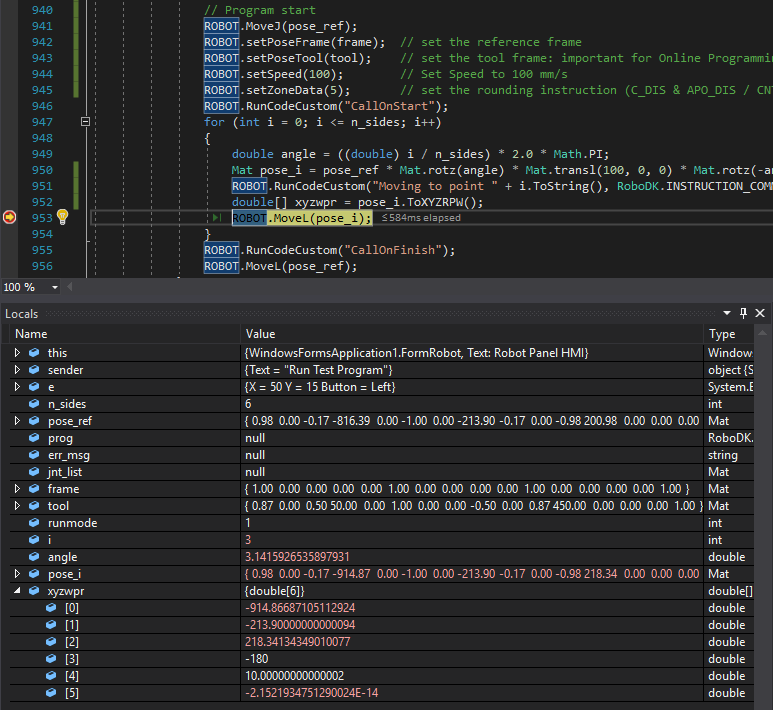
他ist auch möglich, den ausf
c#程序können离线下的Verwendung des gleichen c#代码erzeugt werden, der zur模拟机器人verwendet wurde(离线编程)。Befolgen Sie diese Schritte, um diese function zu testen;
1.民意调查您Offline-Programmierung我是Abschnitt ausf
2.民意调查您Testprogramm ausfuhren奥德·埃尔·冯·贝维根的组合
3.民意调查您Testprogramm ausfuhren奥德·埃尔·冯·贝维根的组合
在《秋天的风》节目中,现代schnell使用了一种模拟的方法,在《秋天的风》节目中使用了一种模拟的方法。运行- modus模型在仿真中的扩展geändert, sobald das程序generiert wurde。

c#程序können direckt am Roboter unter Verwendung des gleichen c#代码ausgefhrt werden, der fendr die Simulation verwendet。Die Online-Programmierung ermöglicht das ausf
1.民意调查您auf Roboter ausfhren
2.Wählen比伯勒先生,我在机器人上的表现很好
Die Bewegungen laufen auf dem realen robot和der Simulator同步,Die Bewegungen mit dem robot。

RDK = Robolink();
RDK.setRunMode (RUNMODE_RUN_ROBOT);
Matlab list - eineprogrammiersprac, die vonMathWorksentwickelt,。MATLAB ermöglicht under anderem Matrixmanipulationen, das Zeichnen von Funktionen and Daten sowie die implementation von algorithm。
即时通讯Hauptteil参考文献werden die Vorteile der Verwendung der RoboDK API mit einer weit verbreiteten Programmiersprache and Matlab fr die Roboterprogrammierung erläutert。
在C: / RoboDK / Matlab / installerert wurde中安装RoboDK- api f
●Robolink。我是克莱恩·克拉斯,我是RoboDK verbunden。Jedes Objekt in der robodk - station - strucktur - konkone des robolink - objects abgerufen werden。它来自robolinkit - object(在der中)Robolink(克拉斯·冯·派森。
●RobolinkItem。我的名字叫Klasse,名字叫robodk - object,名字叫Stationsbaum darstellt。Es ist möglich, verschiedene Operationen f
●transl。米,rotx。米,roty。我和罗茨。m sind function, die Pose-Matrizen mit einem XYZ-Translationsvektor der Rotationen entlang einem估计中文erzegen。
●Pose_2_XYZRPW。m和xyzrpw__pose。m ermöglichen das Konvertieren von Posen in XYZ-Position and RPW-Euler-Winkel and umgekehrt。我们的信息可以在Abschnitt找到她Bezugssysteme。
Ein Beispielcode ist auf der folgenden Seite verfgbar:
//www.sinclairbody.com/Matlab-API
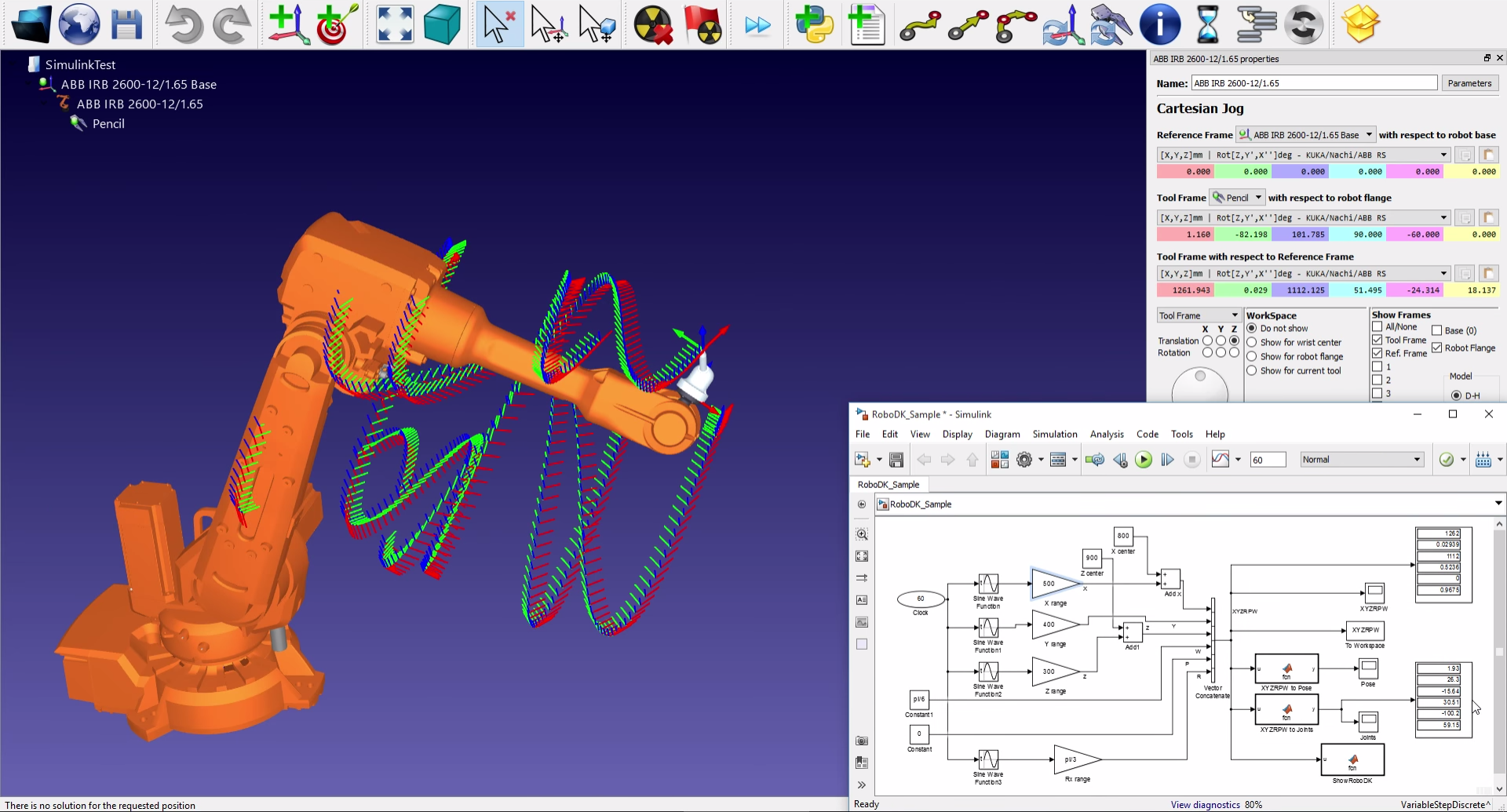
Ein Simulink-Projekt ist albeispiel verfgbar。在der Simulation(仿真)中,der robot(机器人)entlang - einer将会k
视频高度:
https://www.youtube.com/watch?v=7DDBMwa0-Oc
在机器人系统中,自动控制系统是一种新型的自动控制系统。
在一般情况下,如果一个人想要获得自由,他就会得到自由
Robodk.exe /[option1] /[option2] open_fileA /[option3] open_fileB…
Sämtliche von RoboDK unterst
●RDK➔RoboDK-Stationsdatei: disese Datei enthält ein ganzes project in iner Datei, einschließlich aller Abhängigkeiten (Roboter, Werkzeuge, NC-Dateien,…)。
●机器人➔Roboterdatei: Durch das Laden einer Roboterdatei是在Bezugssystem中使用的机器人。
●Werkzeug➔工程数据:风力自动控制系统与自动控制系统研究进展angehängt。
●stl / wrl /步骤/ stp / iges igs /奉养➔object (3D-Geometrie): object können einfach在Werkzeuge umgewandelt了。
●apt / gcode /数控➔nc - programdatei: RoboDK ereitet automatisch in Fräsprojekt vor (dienstprogram)➔Frasprojekt)。
RDK = Robolink(args='/ADDFRAME '/ RENAME=Main Ref ' load_object.stl')
verfgbare Kommandozeilen选项:
/ NOSPLASH
进入RoboDK-Splash图标开始。
/调试
erstelleine RoboDK.debug.txt日期在本命令中。在调试过程中发现了一些问题。
/设置= filepath
Lädt die Argumente aus iner Textdatei。Jede Zeile didier文本数据也存在于参数背叛中。
/ NOSHOW
混合alle Fenster aus, während RoboDK Dateien lädt和程序aktualisiert。
/ NO_WINDOWS
混合了所有的芬斯特(Fenster),模具正常运行,并在拉丹(Laden)和NC-Datei自动控制尺寸。
/端口= 20501
接口通信
/ ADDFRAME
在日本,有一种新的系统。Alle neen geladenen objjekte werden in diesem platziert。
/重置
Erzwingt, dass bebem Laden eines neen objects das bezugssystem der Station(夜间der zuletzt hinzugefgte Frame) angezeigight wind)。
/重命名=名字
Ändert den Namen des letzten Bezugssystems order objects, das hinzugefgt wurde。
/移动= x, y, z;处方;变化;rz
Verschiebt das letzte Bezugssystem, das hinzugef
/ UPDATE_APT =是的
Überschreibt alleroboterbearbeiitungsproject,我们的柴油引擎apt - datehaen
/ UPDATE_APT =没有
Überschreibt keine Roboterbearbeitungsprojekte (erstellt beiiner namens.com)。
/更新= file.apt
Lädt order aktualisiert die APT-Datei和erstellas roboterprogram,当keine problem autreten。
/ REPLACE_ITEMS =是的
在此基础上,我们提出了一种新的研究方法,即研究对象和研究对象之间的关系。
/ REPLACE_ITEMS =没有
Überschreibt niemals Werkzeuge and object, wenneue Dateien geladen werden。
/改变颜色=钢蓝色的
物体、工作、机器人、机械)测试。法比可以用“法比”来表示,法比可以用“法比”来表示。
/ AUTOGEN_MAINPROG =掠夺
在新计划中,我们将在新计划中使用新计划。
/ SELECTTOOL = # 1
Verwenden Sie das erste Roboterwerkzeug (der die entrechende numer)也是如此aktiv西文德语:德语:德语:德语:德语:德语:德语:德语:德语
/ SELECTTOOL =工具名称
Wählen谢谢aktiveWerkzeug bei einer namenensteringingaus。
/ ADDCUTTER = |路径长度/刀name.stl
Addcutter ermöglicht das hinzuf
/ SELECTCUTTER =刀的名字
选择刀具的效果是选择工具,选择刀具的效果是选择工具,选择刀具的效果是选择工具。
/显示
身高为RoboDK-Fenster和。无源自动化,无源自动化,无源自动化,无源自动化。
Wenn Sie eine der folgenden Optionen verwenden, wind die durch den Befehl /SHOW augerufene Sichtbarkeit geändert。
/隐藏
Vermeidet das automatische /SHOW, sobald RoboDK fertiding ding hat。Die einzige Möglichkeit, das Fenster anschließend anzuzeigen, ist Die Verwendung der API。
/退出
在这个项目中,我们将继续前进。
/结束
Beendet的程序,每一个bei Fehlermeldungen。