RoboDK API
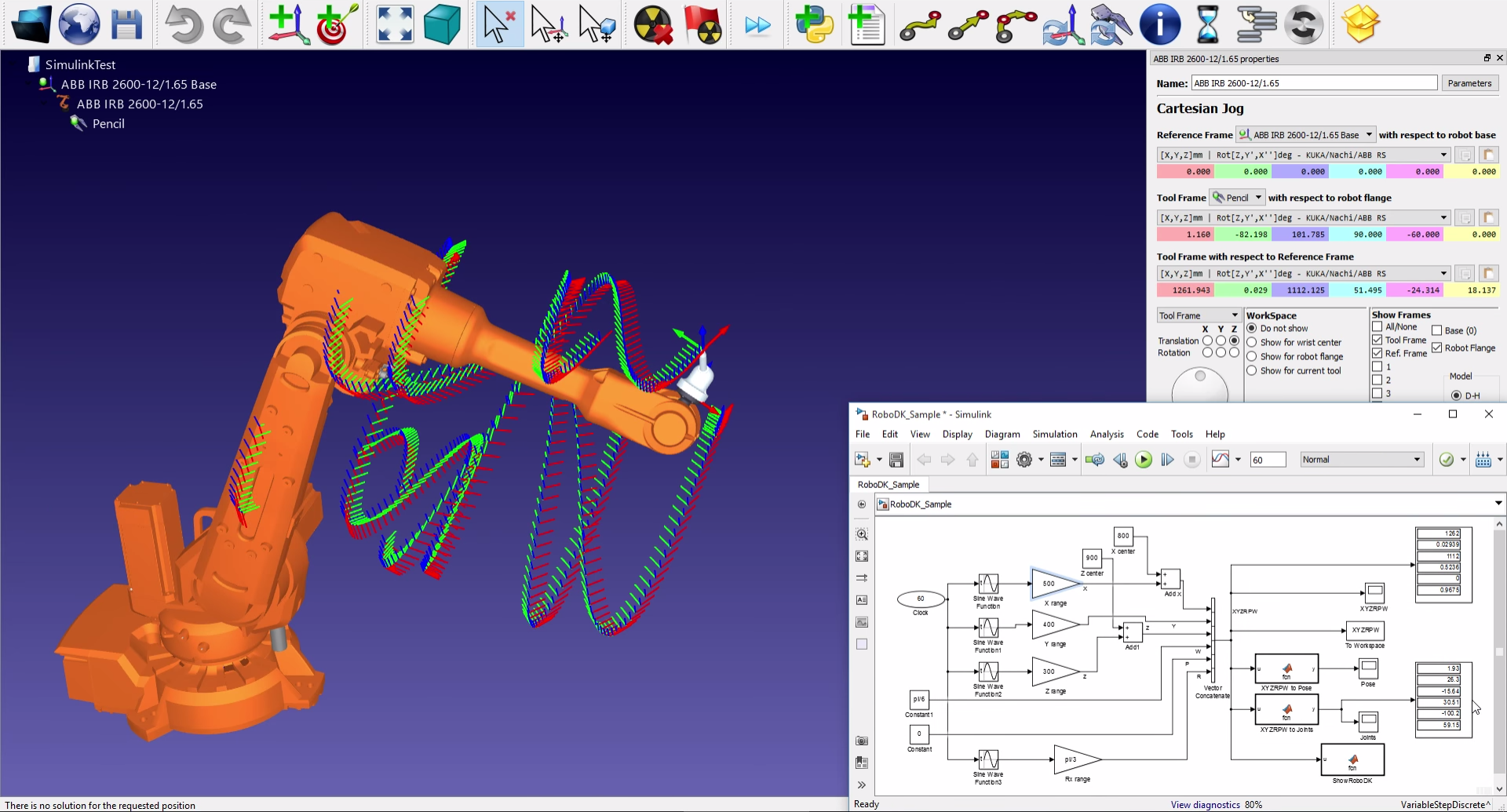
Ein Simulink-Projekt ist als Beispiel verfügbar. In der Simulation wird der Roboter entlang einer willkürlich erzeugten Menge von XYZ-Koordinaten bewegt.
Das folgende Video zeigt das Ergebnis der Simulation:
https://www.youtube.com/watch?v=7DDBMwa0-Oc