RoboDK API
C# Programme werden standardmäßig simuliert, wenn Roboterbefehle verwendet werden (z.B. MoveJ, MoveL oder setDO). Wenn das Beispiel C# Projekt gestartet wird, wird standardmäßig auch der Simulationsmodus ausgewählt.
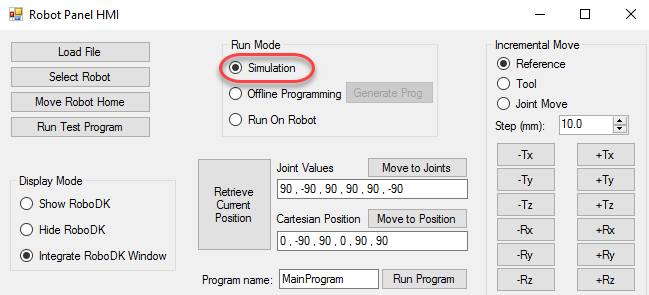
Dies bedeutet, dass die Roboterbewegungen in RoboDK simuliert werden. Zum Beispiel können Sie den Roboter in Schritten von 10 mm bewegen, indem Sie die Schaltflächen rechts verwenden (+ Tx, -Tx, ...).
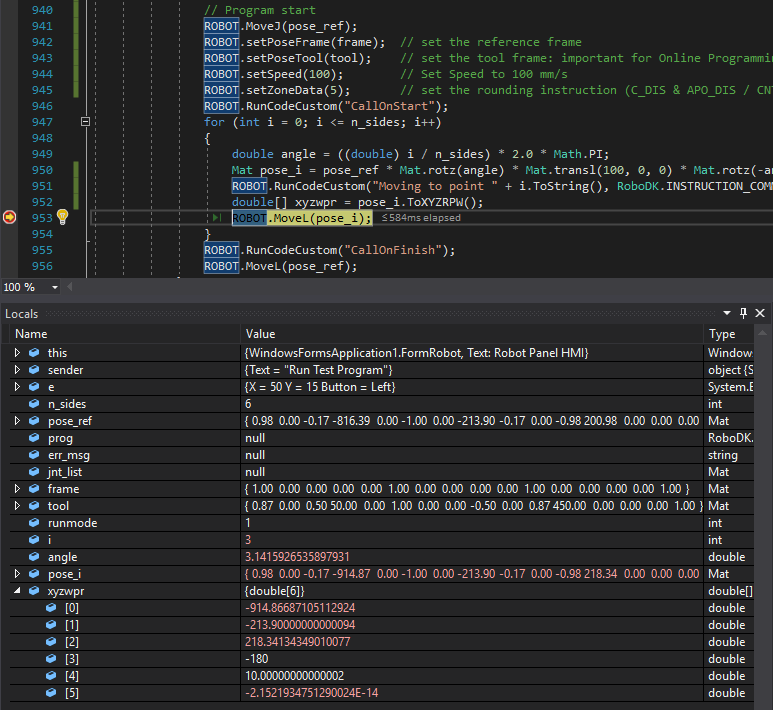
Setzen Sie Haltepunkte, um Ihre Anwendung zu debuggen und Roboterziele zu überprüfen. Roboterziele können als Achswinkel oder Mat-Variablen (4x4 -Matrizen) definiert und als XYZWPR-Format zur Fehlerbehebung von Programmproblemen untersucht werden. Weitere Informationen zu Bezugssystemen finden Sie im AbschnittBezugssysteme.
Es ist auch möglich, den Ausführmodus inOffline ProgrammierungoderOnline Programmieirung(auf Roboter ausführen) zu ändern, wie in den folgenden Abschnitten gezeigt