Python-Programme können direkt auf dem Roboter mit dem gleichen Python-Code ausgeführt werden, der zur Simulation des Roboters verwendet wurde (bereits in derPythonsimulationgezeigt). Die Online-Programmierung ermöglicht das Ausführen eines Programms auf einer bestimmten Robotersteuerung mithilfe von Robotertreibern:
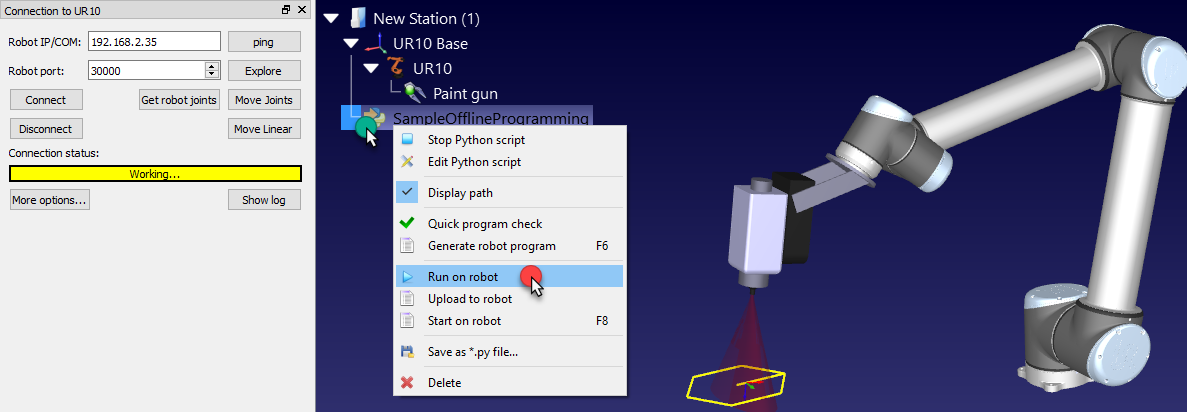
1.Klicken Sie mit der rechten Maustaste auf ein![RoboDK API - Bild 10]() Python-Programm
Python-Programm
2.Wählen SieAuf Roboter ausführen
Das Programm wird auf dem Roboter ausgeführt, während das Python-Programm ausgeführt wird.
Wichtig
: Eine Verbindung zwischen dem PC und dem Roboter ist erforderlich, indem Sie Robotertreiber verwenden (klicken Sie mit der rechten Maustaste auf einen Roboter und wählen Sie dannMit Roboter verbinden...). Weitere Informationen finden Sie im Abschnitt
Robotertreiber
.
![RoboDK API - Bild 11]()
Anmerkung
: Mit der Optionauf Roboter ausführenwird der
RunMode
der RDK/Robolink-Verbindung automatisch auf RUNMODE_RUN_ROBOT gesetzt. Es ist somit möglich, die Roboterbewegungen außerhalb der RoboDK-GUI auszuführen. Beispielsweise:
RDK = Robolink()
RDK.setRunMode(RUNMODE_RUN_ROBOT)
Tipp
: Das Makro
SampleOnlineProgramming.py
aus dem Ordner C:/RoboDK/Library/Macros/ bietet ein vollständiges Beispiel, um es mit demselben hexagonalen Pfad zu testen, der im Abschnitt
Python Simulation
verwendet wird.
Anmerkung
: Weitere Informationen zur Verwendung von Robotertreibern über die API im Abschnitt
Robotertreiber
.