RoboDK-Add-In für Rhino
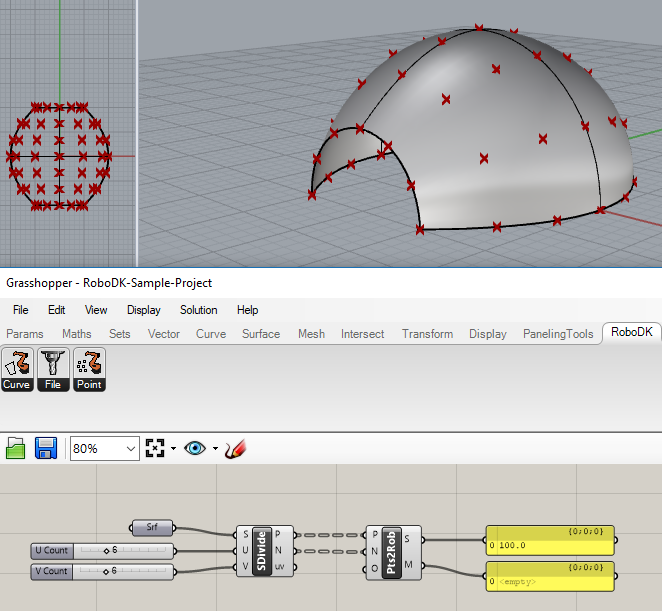
Dieses Beispiel zeigt, wie das RoboDK-Plug-in für Grasshopper verwendet wird, indem eine Fläche als Punktgitter geteilt und mit einem Roboter für einen Bohrvorgang in RoboDK verfolgt wird:
1.Laden Sie das mit dem RoboDK-Plug-in mitgelieferte Grasshopper-Beispiel (3dm-Datei und gh-Datei).
2.Klicken Sie mit der rechten Maustaste auf die KomponentePts2Robund wählen SieRobot Setup Options (RoboDK). Wählen SieLoad Project...und wählen SieDefault Setup, um eine RoboDK-Beispielstation zu laden (dasselbe Beispielprojekt, das im vorherigen Abschnitt gezeigt wurde).

Optional können Sie den Objektnamen als Komponenten-Input (O) angeben. Sie können auch ein Projekt in den Komponentenoptionen angeben, so dass das gewünschte RoboDK-Projekt mit jeder Komponente verwendet wird.
3.Wählen Sie in GrasshopperSolution➔Recompute(F5), um das Teil und das Programm in RoboDK zu aktualisieren.
Hinweis:Aktualisieren Sie die Robotereinrichtung in RoboDK. Doppelklicken Sie beispielsweise auf einen Bezugsrahmen oder einen Werkzeugrahmen, um die richtigen Koordinaten für die Roboterreferenz bzw. das Werkzeug einzugeben.
