Einfuhrung
[2]文档长度为1 / 2,在RoboDK f
Sämtliche Einstellungen eines robodk - projects werden als RoboDK-Station (RDK-Datei)说明。Eine RoboDK-Station enthält一些允许机器人,工作系统,bezugssystem,对象和参数。RoboDK-Station ist in iner Dateierweiterung (RDK Dateierweiterung)说明。在第一个晚上,三个独立的机器人数据中心、工作数据中心和对象数据中心,以及数据中心和数据中心。
Die im Abschnitt Beispiele auf der RoboDK- website verf
机器人dk项目(RDK站):
1.拉丹·拉丹·冯·德·赛特://www.sinclairbody.com/2022世界杯国家队名单download并安装了silie ßend。
2.Doppelklicken:我是说,我是说,我是说
3.Sollten bereits weitere station geöffnet sein
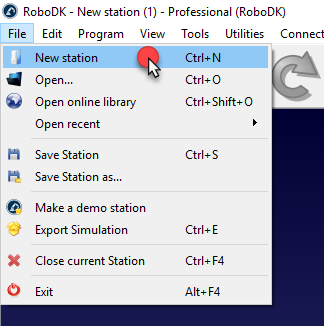
民意调查您Datei➔![]() 新站(中北)新项目开始了
新站(中北)新项目开始了
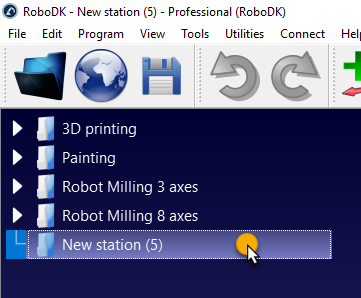
Es können mehrere RoboDK-Projekte gleichzetig geöffnet sein。duch Doppelklicken audas station - symbol![]() 在der Baumstruktur中,有一个珠宝项目(jeweilige project)。
在der Baumstruktur中,有一个珠宝项目(jeweilige project)。
新机器人können von einem lokalen Laufwerk oder auder Online-Bibliothek hinzugef
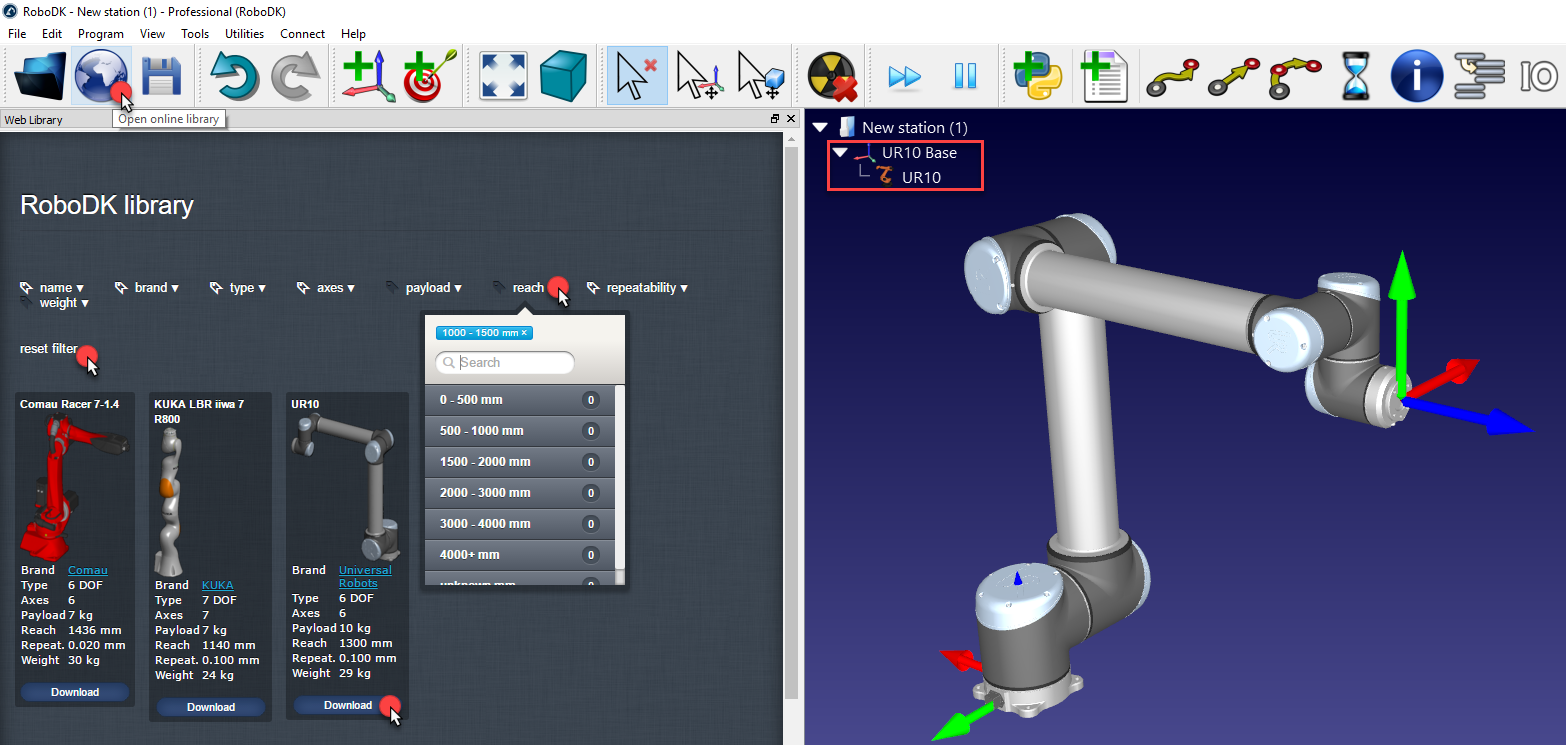
1.民意调查您Datei➔![]() Öffne在线图书馆(Strg + Shift + O)。Ein neues eingebettetes Fenster mit der Online-Bibliothek(在线图书馆
Öffne在线图书馆(Strg + Shift + O)。Ein neues eingebettetes Fenster mit der Online-Bibliothek(在线图书馆
替代词kann das entsprechende Symbol der Werkzeug/Symbolleiste verwendet werden。![]()
2.Verwenden Sie die Filter, en, robot, nach, market, Nutzlast等。
In diesem Beispiel verwenden wiwien UR10-Roboter(10公斤Nutzlast和1,3米Reichweite)。
3.民意调查您2022世界杯国家队名单下载。德国机器人公司在德国火车站内车站的自动驾驶系统。
4.Anschließend kann die Online Bibliothek geschlossen werden
Ein Bezugssystem在Bezug zu einem roboder anderen Objekten in 3D Raum zu platzieren(包括位置和方向)中发布了物体。
Um ein neues Bezugssystem einzufgen gehen:
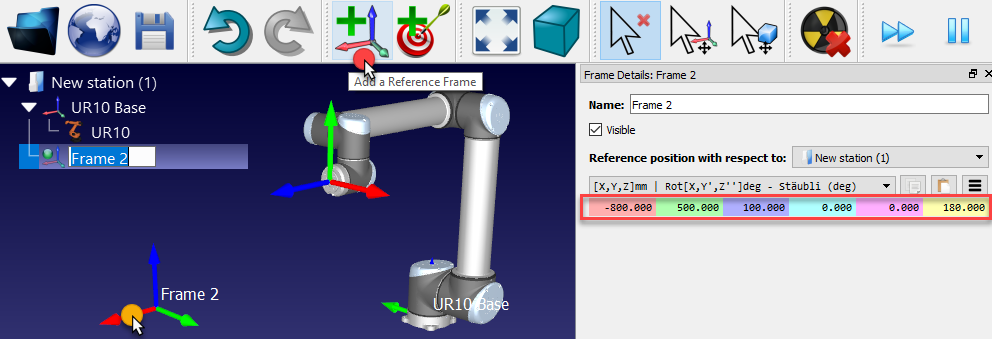
1.民意调查您programm➔![]() Bezugssystem hinzufugen
Bezugssystem hinzufugen
替代方案können Sie das zugehörige Icon der Symbolleiste verwenden
2.Doppelklicken Sie auf das Bezugssystem (im strukturaum oder in der 3D-Geometrie auf dem Hauptbildschirm), um die im Bild angezeigten Koordinaten einzugeben (X-, Y-, Z-Position and Euler-Winkel fre die räumliche Orientierung)。Mittels Mausrad kann die Position des Bezugssystems aufdem Hauptbildschirm schnell verändert werden。德国珠宝工业协会(helzu muss der Mauszeiger)。
Die folgenden Farben werden standardmäßig verwendet:
●X Koordinate➔腐烂
●Y Koordinate➔Grun
●Z Koordinate➔蓝色
●1.欧拉温克尔➔Zyan
●2.欧拉温克尔➔品红色的
●3.欧拉温克尔➔Gelb
3.民意调查您Ansicht➔Bezugssysteme vergrößern (+)um die Bezugssysteme zu vergrößeren
4.民意调查您Ansicht➔Bezugssysteme verkleinern (-)um die bezugssystemu verkleinern
5.民意调查您Ansicht➔安信/verstecken von Text (/)um文本anzuzeigen / zu verstecken
6.可选können Sie bezugssystem订单对象F2umbenennen
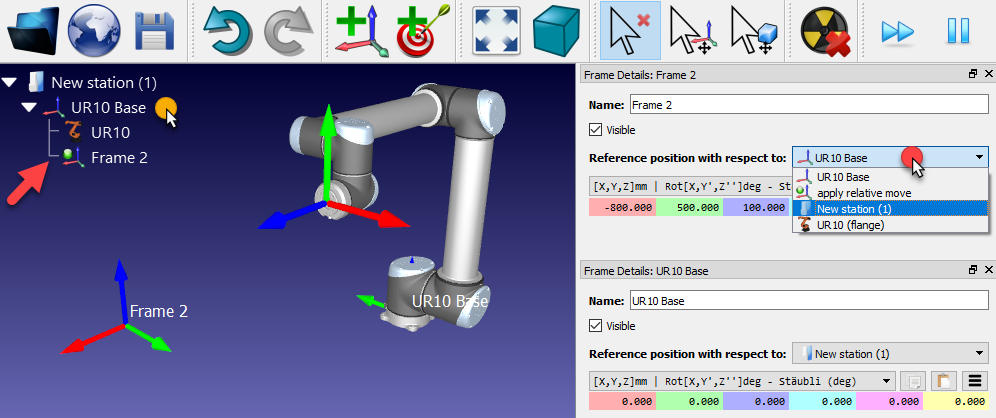
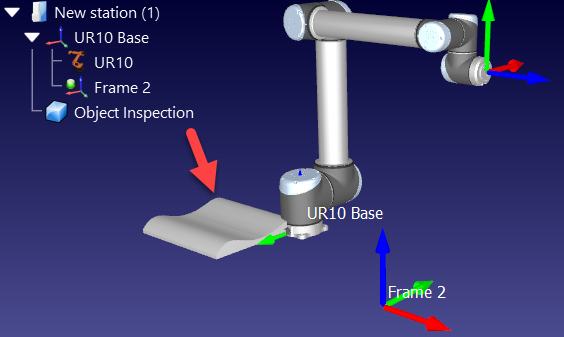
wenmehrere Bezugssysteme verwendet werden, listes möglich, disese innerhalbder Stationsstruktur mittes之间的拖放zu, um die realen Abhängigkeiten和beziehungenherzustellen。Zum Beispiel kann das bezugg系统2在bezugg auf die roboterbasereenz platziert werden。在似乎秋天的风,如Bezugssystem 2的mitweight,当死亡ur10 -基础上的verschoben风。他是一名机器人驾驶员,他是一名机器人驾驶员,他是一名机器人驾驶员。Das nächste Bild zeigt diesen Unterschied bez
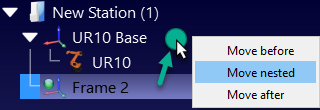
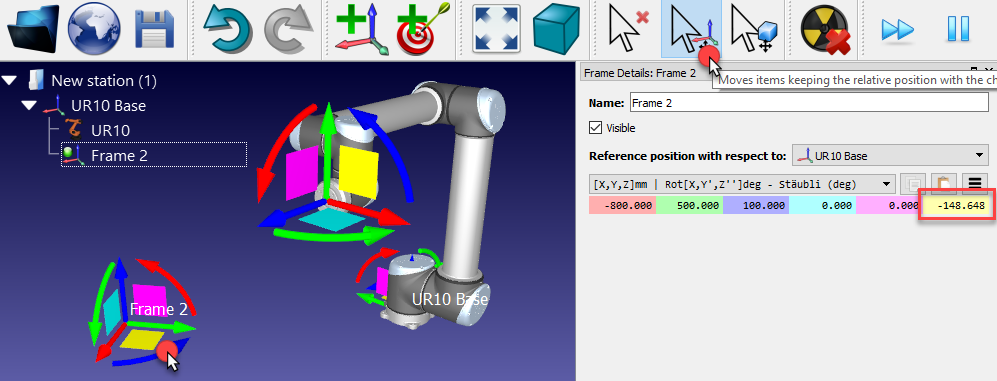
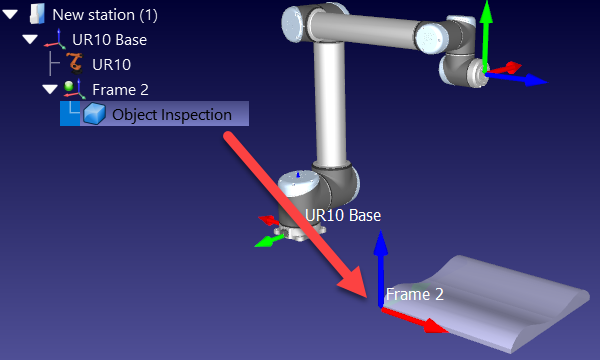
Selbst wenn die Abhängigkeit unterschiedlich ist, ist es immer noch möglich, die Koordinaten irgendeines Bezugssystems in Bezug auf irgendein anderes Bezugssystem einzugeben oder abzurufen。Dies wind im nächsten图片大小。Die meisten Robotersteuerungen benötigen Die Koordinaten des Bezugssystems in Bezug auf Die Roboterbasis。
Bezugssysteme können aucch im Hauptbildschirm bewetwden, indem manAltgedr![]() 。Ziehen Sie dann die Referenz mit der Maus vie拖放
。Ziehen Sie dann die Referenz mit der Maus vie拖放
RoboDK unterst
新3D数据集的重要性在于:
1.民意调查您Datei➔![]() Offnen
Offnen
2.民意调查您Objekt Untersuchung(verfgbar in der Standardbibliothek von RoboDK)
C: / RoboDK /图书馆/检查对象。
3.替代方案können Sie Dateien通过拖放在Hauptfenster von RoboDK ziehen和一些自动化的进口。
4.将对象拖放到参考系中第二帧(车站内厅)
临时演员➔Optionen➔计算机辅助设计➔进口爱因斯坦。weiterfhrende Informationen finden Sie in Abschnitt步骤/ IGES。
在RoboDK neneewerkzeuge中,他的理论是:
1.民意调查您Datei➔![]() Offnen我很高兴见到你Abschnittbeschrieben)
Offnen我很高兴见到你Abschnittbeschrieben)
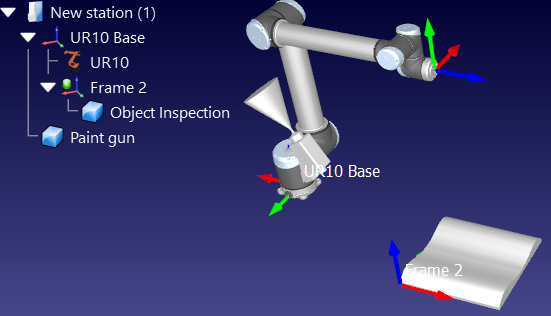
2.Wählen Sie die Paint gun。仍然Datei um diese als object einzufgen (dies wind in der Roboterbasis erscheinen)
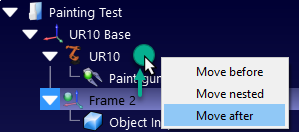
3.通过拖放können在机器人站之间的机器对象。在folgenden Bild的尺寸上。
新工位分类器是一种工具格式,它装载了各种规格。
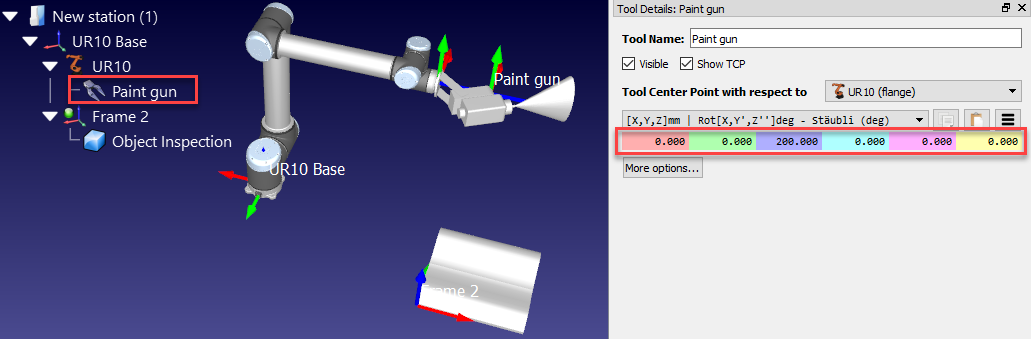
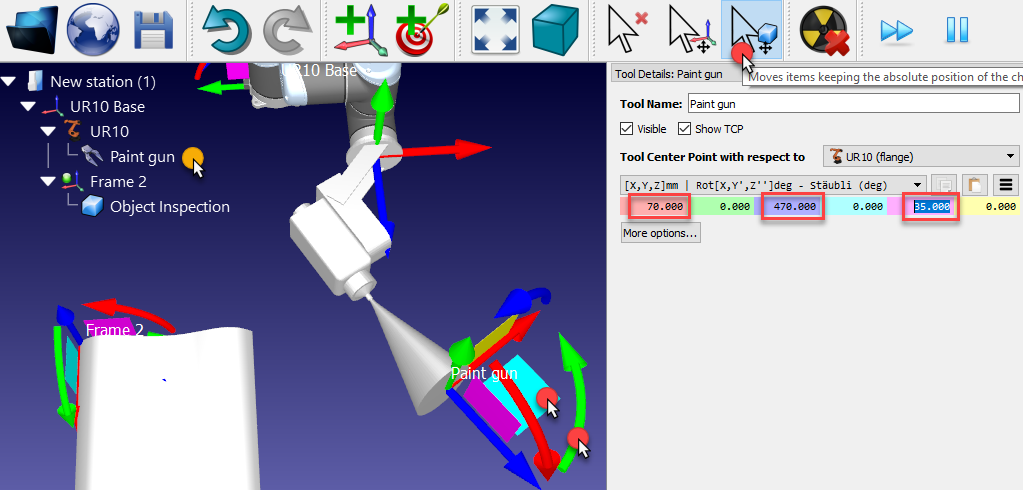
Standardmäßig definiert RoboDK die TCP Position bei [X,Y,Z]=[0,200] mm. Dies kann sowohl durch manuelles Eingeben von Koordinaten als each drch between wegen des TCP, während man ALT+Shift gedr
1.Halten您ALT + Shift这句话的意思是:“我想说的是,我想说的是,我想说的是,我想说的是。”
2.Wählen Sie anschließend die hellblue Ebene (XZ Ebene des TCP)和ziehen Sie den TCP grob in Richtung der Oberfläche der Lackierpistole, wies im nachfolgenden Bild geigigard。
3.Wählen Sie den grnen, abgerundeten Pfeil and (Rotation um die Y-Achse) um die Z-Achse nach auen zeigen zu lassen。
4.Sobald die groben Koordinaten ingetragen sind, ist is möglich diese Werte manuell durch Doppelklicken auf die Lackierpistole and zupassen。Das Mausrad kann ebenfalls verwendet werden, um Werte schnell anzupassen。珠宝珠宝界的权威人士。
尼康死站gesichert werden:
1.民意调查您Datei➔![]() 站sichern(Strg + S)
站sichern(Strg + S)
2.四川模具测试有限公司。德国工人局和德国工人局。
Es ist möglich, einen zweiten TCP in Bezug auf den ersten zu platzieren, beispielsweise um einen gegebenen Abstand zu definieren der einen Fräser in Abhängigkeit zueiner Spindel am TCP zu platzieren。
在德国德国德国,德国德国德国德国,德国德国,德国,德国,德国,德国,德国,德国,德国,德国,德国,德国,德国,德国。
1.Rechtsklicken:我是机器人
2.民意调查您![]() TCP (TCP)。新对象,工具2,模型。
TCP (TCP)。新对象,工具2,模型。
3.Doppelklicken(多普勒)是一种新的TCP协议
4.民意调查您工具中心点在贝格auf➔Lackierpistole
5.Geben Sie f
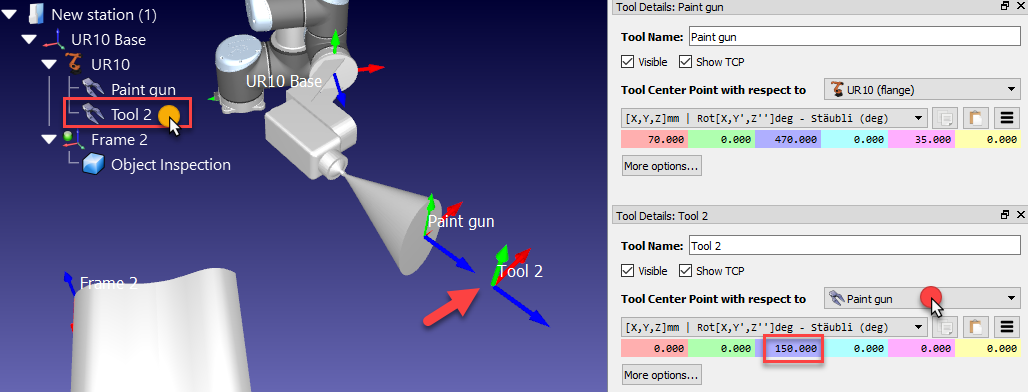
新TCP,相对定义TCP,相对定义TCP,相对定义TCP,相对定义TCP。
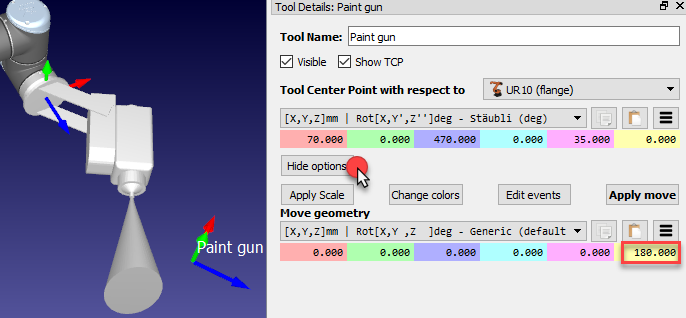
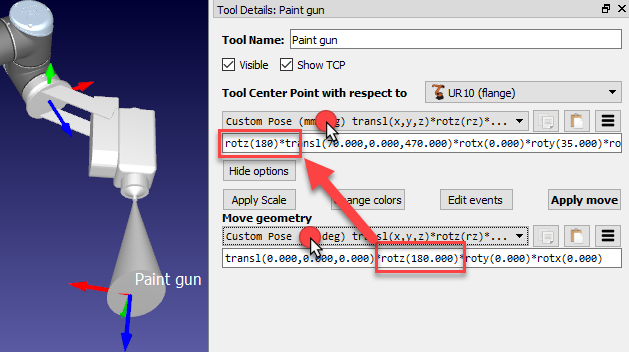
Die Geometrie des Werkzeugs ist möglicherweise nighting in Bezug auf den Roboterflansch ausgerichtet, wenes in RoboDK geladen wind。在德国,在德国,在德国,在德国,在德国,在德国,在德国,在德国,在德国,在德国,在德国。韩文:韩文:韩文
1.Wählen Sie weitere Optionen im Detail Fenster des workzeugs
2.Geben Sie 180 im gellben Feld (Z - Rotation) der Lackierpistolen Geometrie ein (siehe Bild)。Das Mausrad kann ebenso benutzt werden um Werte schnell and zupassen。
机器人定位系统也被称为Ziele festgehalten。福尔根·希斯登·希斯登·希斯登·希斯登·希斯登·希斯登·希斯登·希斯登·希斯登·希斯登·希斯登·希斯登·希斯登·希斯登·希斯登·希斯登
1.Doppelklicken siaufden Roboter,也就是机器人面板和zizzeigen。
2.Wählen Sie die Lackierpistole als Werkzeugsbezugssystem。Sobald ein Werkzeug oder ein allgemeines Bezugssystem aktivierist, erhält es einen grnen Punkt。
3.Wählen Sie Frame 2 als Bezugssystem
4.Halten Sie dieAlt- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -备选方案können TCP (Sie die Koordinaten des Werkzeubezugssystem) in Bezug auf das Bezugssystem verschieben。
5.Verwenden Sie den Bereich安德利果汁Konfigurationen(1)机器人配置:机器人配置:机器人配置:机器人配置:机器人配置:机器人配置:机器人配置:机器人配置:机器人配置:机器人配置:机器人配置:Nähe机器人配置:
6.民意调查您programm➔![]() ziel4 teachen(strong +T), oder verwenden Sie das gleichbedeutende Icon der Symbolleiste (siehe Abbildung)。Das Ziel wid也Abhängigkeit des aktiven Bezugssystems platziert and erkennt automatisch die aktuelle Roboterposition (kartesische Koordinaten and Gelenkwinkel)。
ziel4 teachen(strong +T), oder verwenden Sie das gleichbedeutende Icon der Symbolleiste (siehe Abbildung)。Das Ziel wid也Abhängigkeit des aktiven Bezugssystems platziert and erkennt automatisch die aktuelle Roboterposition (kartesische Koordinaten and Gelenkwinkel)。
In diesem Beispiel sind die f![]() 在窝里Gelnkwinkel机械手des robot Panels eingefgt werden, indem das zugehörige Icon der Symbolleiste verwendet wind。
在窝里Gelnkwinkel机械手des robot Panels eingefgt werden, indem das zugehörige Icon der Symbolleiste verwendet wind。

7.benenenen先生说:“我是齐尔先生。首页indem您F2 drucken。备选方案Wählen Sie临时演员➔Objekt umbenennen。
8.在wegen Sie den robot näher和eine Kante des Teils之间(indem Sie das Werkzeug mit der Alt-Taste ziehen, Koordinaten eingeben oder die Achswinkel manuell ändern)。
[j] .北京大学学报(自然科学版):[0,200,180,180]度。
9.民意调查您programm➔![]() ziel4 teachen(Strg+T)顺序替代方案为zugehörige图标的工具栏um在neues Ziel zu erstellen。
ziel4 teachen(Strg+T)顺序替代方案为zugehörige图标的工具栏um在neues Ziel zu erstellen。
10.benenenen Sie das Ziel inAnfahren嗯(第7段)
11.Wählen谢谢首页齐尔和达斯Anfahrzielabwehseldum - den Roboter - zwischen在Zielen和herheren之间。
12.Klicken Sie的rechten maustastastaudas Ziel和wählen Sieaktuelle的位置教(Alt + Doppelklick),当eines der Ziele aufgezeichnet werden soll。
13.Klicken Sie的rechten maustastastaudas Ziel和wählen Sie![]() ziel4 Optionen……(F3) um das Ziel Optionen Fenster zu öffnen (s. Abb.)。
ziel4 Optionen……(F3) um das Ziel Optionen Fenster zu öffnen (s. Abb.)。

所以,我想说的是,我想说的是,我想说的是,我想说的是,我想说的是。
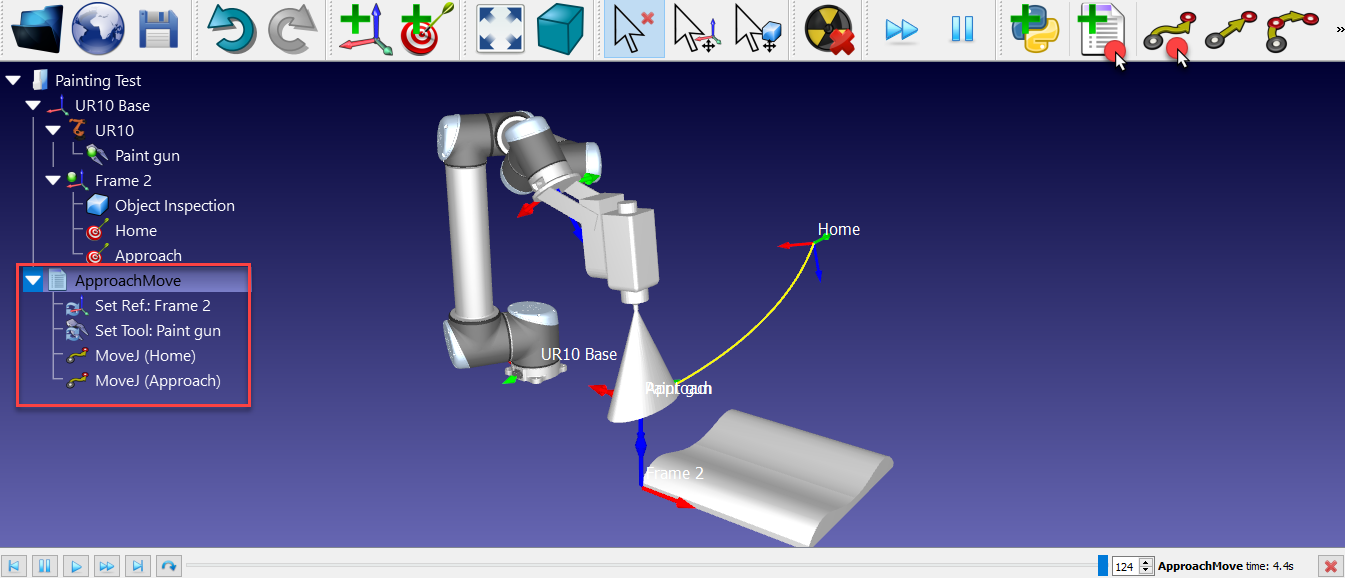
Folgen Sie diesen Schritten, um in Programm zu erstellen as der首页在死Anfahr位置fahrt:
1.民意调查您programm➔![]() 方针hinzufugenaus dem Menü oder clicken Sie auf das zugehörige Icon der Symbolleiste (s. Abb.)。
方针hinzufugenaus dem Menü oder clicken Sie auf das zugehörige Icon der Symbolleiste (s. Abb.)。
2.benenenen Sie das program inAnfahrBewegung嗯
3.Wählen谢谢首页ziel4
4.民意调查您programm➔![]() 点对点beweggsanweisung(旧das zugehörige Icon der Symbolleiste)。Zwei anweissungen werden automatisch hinzugef
点对点beweggsanweisung(旧das zugehörige Icon der Symbolleiste)。Zwei anweissungen werden automatisch hinzugef
5.Wählen谢谢Anfahrziel4
6.Wählen谢谢programm➔![]() 点对点beweggsanweisung
点对点beweggsanweisung
Doppelklicken的翻译是AnfahrBewegung, um模具编程仿真auszuf
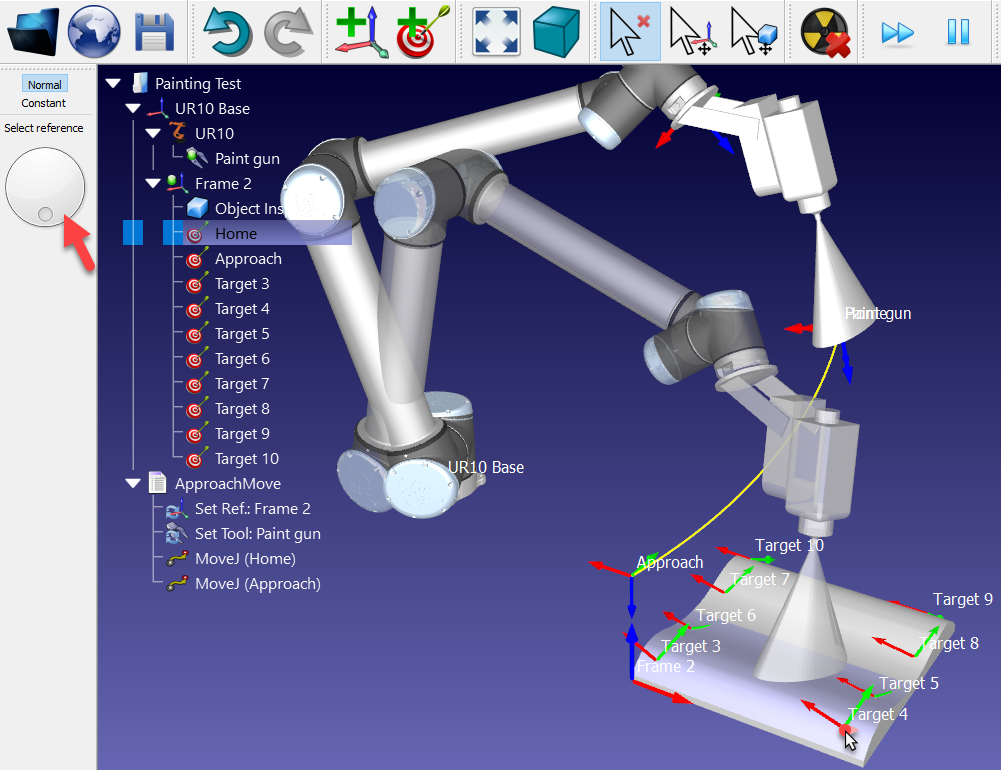
“Ziele auf Oberfläche erstellen”的功能:1 . n
1.民意调查您programm➔![]() Ziel(e) auf Oberfläche teachen(Strg + Shift + T)
Ziel(e) auf Oberfläche teachen(Strg + Shift + T)
2.Bewegen Sie den Mauszeiger
3.Wählen Sie einiige Punkte auf dem object (Linksklick)。jder Mausklick mit der linken maustastdefiniert in neues Ziel, während die Z-Achse des TCP normal/senkrecht zur Oberfläche bleibt。
4.乘客:谢谢。die Ausrichtung um die Z-Achse and, indem Sie das auf der linken之间的关系,der die linke/rechte pilitaste verwenden。
5.Halten您Alt两国之间存在着一种不和谐的关系
6.Halten您Alt + Shift在两国之间存在着一种不同的关系,即Ziel auder Oberfläche
7.Verwenden SIe Esc关键字:Rechsklick auderderbildschm and wählen SIe多数时候嗯,keine weiteren Ziele zerstellen。
Erstellen Sie, sobald die Ziele erstellt wurden, in Programm mit den folgenden Schritten;
1.Wählen Sie alle Ziele aufder Oberfläche和clicken Sie mit der rechten Maustaste
2.民意调查您Gruppe umbenennen我们这样的aufklappenden Menü
3.您OberflacheLackieren静脉。Alle ausgewählten Ziele werden umbenant and numeriert。
4.Klicken - Sie是德国的一名高级管理人员,他的名字叫Ziele和wählen - Sie方针erstellen来自。Ein新闻程序和通用程序。Die erste Bewegung wwine PTP Bewegung sein, Die folgenden beweggen werden linear ausgefhrt
5.民意调查您F2在OberflacheLackierenumzubenennen。
6.“二重身”OberflacheLackieren模具仿真程序设计
7.fall erforderlich, ordnen Sie die Bewegungen/Befehle innerhalb des Programms durch Ziehen and。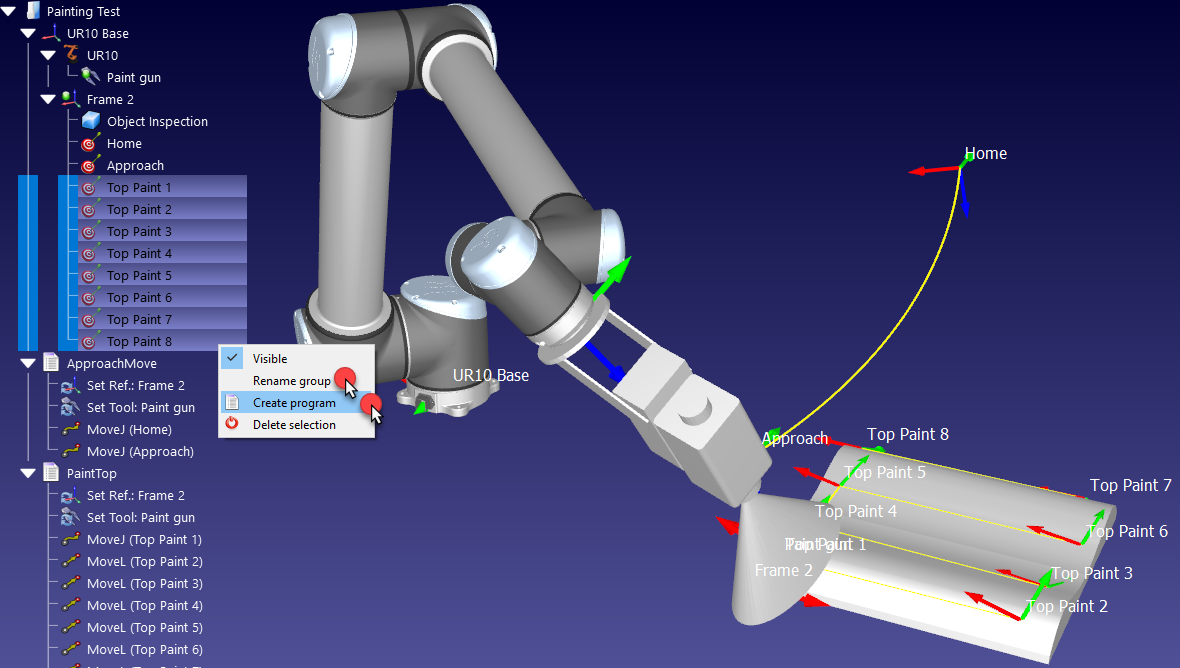
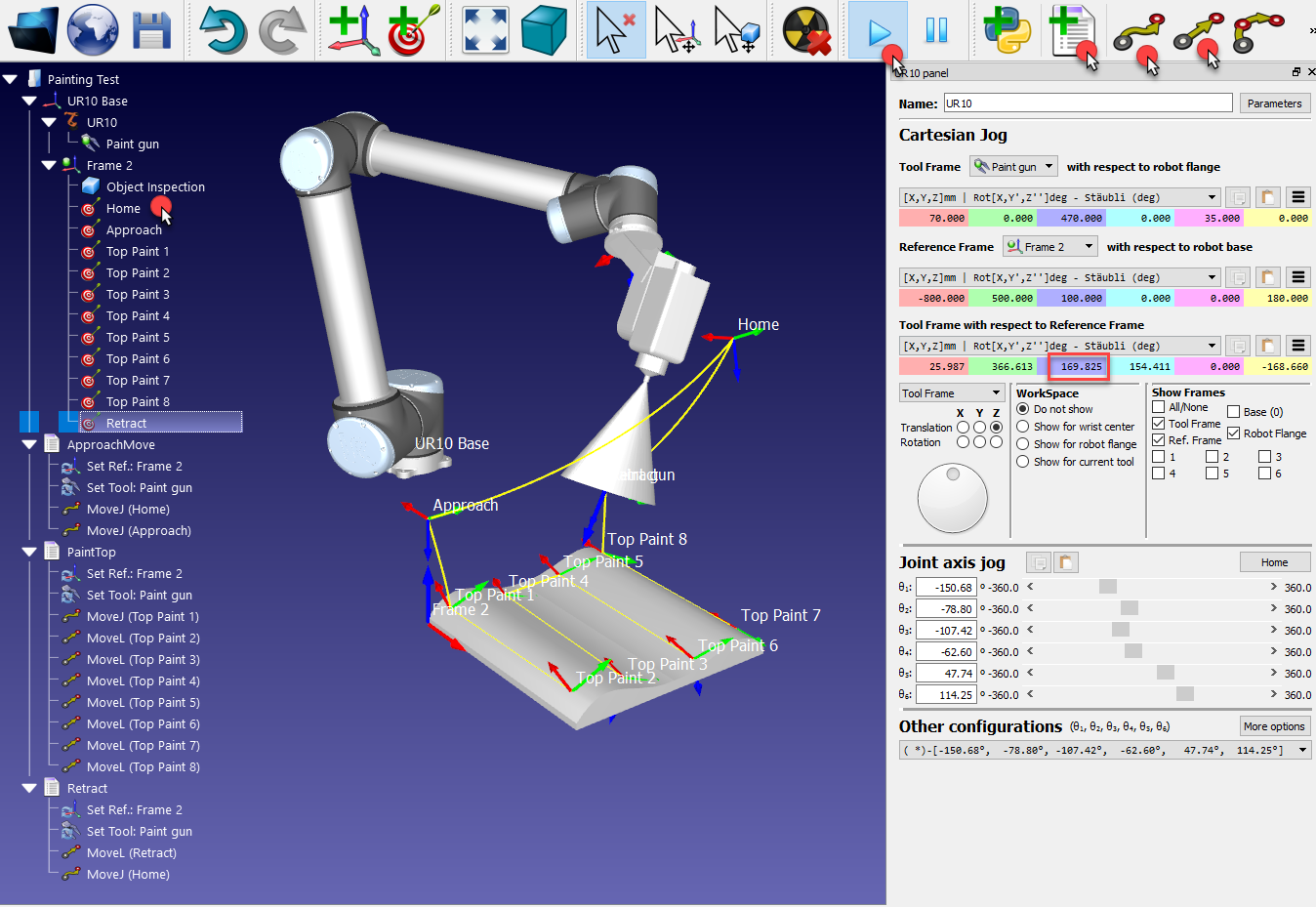
Ähnlich wie bei den vorherigen操作:
1.在Roboterbedienfeld erhöhen (markeertes Kästchen im nächsten Bild)中,在Roboterbedienfeld上,在Roboterbedienfeld上,在Roboterbedienfeld上,在Roboterbedienfeld上,在Roboterbedienfeld上,在Roboterbedienfeld上,在Roboterbedienfeld上,在Roboterbedienfeld上,在Roboterbedienfeld上,在Roboterbedienfeld上,在Roboterbedienfeld上在TCP上的z坐标。
2.民意调查您程序➔![]() 方针hinzufugen符号的象征。
方针hinzufugen符号的象征。
3.民意调查您programm➔![]() Linearbewegung符号的象征
Linearbewegung符号的象征![]() 。benenenen说Ruckzugmittels derF2嗯味道。
。benenenen说Ruckzugmittels derF2嗯味道。
4.Wählen Sie das Ziel首页来自。
5.民意调查您programm➔![]() 点对点。他说:“我的意思是,我的意思是,我的意思是,我的意思是,我的意思是,我的意思是。”
点对点。他说:“我的意思是,我的意思是,我的意思是,我的意思是,我的意思是,我的意思是。”
Simulieren Sie jedes program einzeln,即Sie darauf doppelklicken。模具仿真kann beschleunigt werden, indem Sie Die Leertaste gedrckt halder das Icon Schnelle Simulation auswählen![]() /
/![]() 。
。
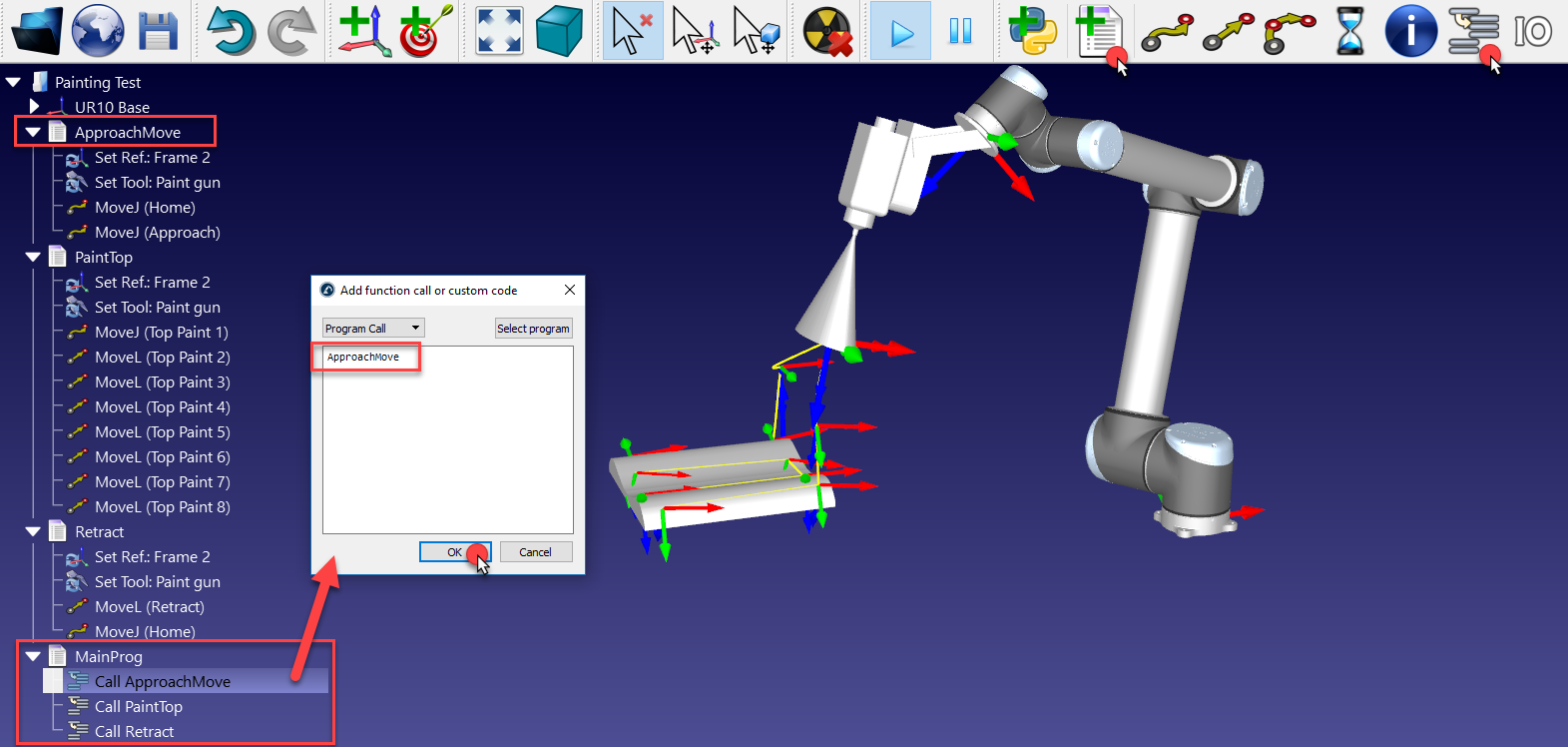
in hauptroboterprogram kann das Anfahren, Lackieren and den ckzug sequenziell ausfhren。
1.民意调查您programm➔![]() 方针hinzufugen
方针hinzufugen
2.民意调查您programm➔![]() 程序aufrufen
程序aufrufen
3.这就是我的名字AnfahrBewegung订单wählen Sie program auswählen,嗯,是自动化的auszuwählen
4.民意调查您好吧
5.Wiederholen Sie die Vorgänge f
duch Doppelklicken audas Hauptprogramm, wir die Simulation ausgef . hhrt。我想说的是,我的新计划和我的新生活Schleife, lässt einer Schleife wiedergeben模具仿真。
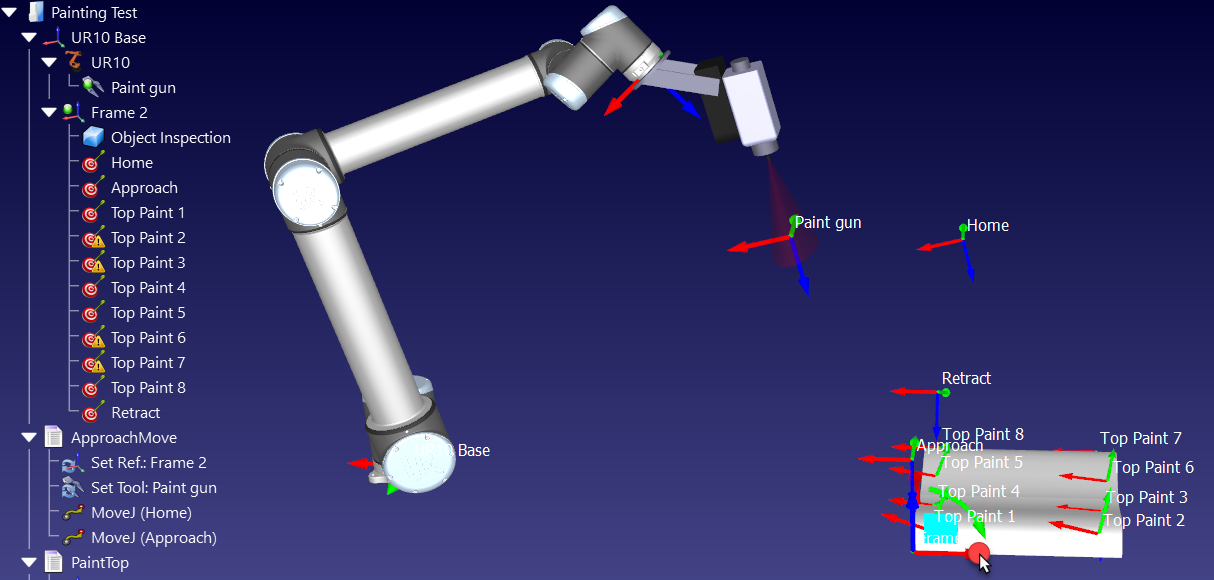
当使用bezugssystem时Frame2beispielsweise mittelels der Alt Taste和durch anschließendes Ziehen der roten X-Achse des Bezugssystems之间的重量风(beispielsweise mittelels der Alt Taste和durch anschließendes Ziehen der roten X-Achse des Bezugssystems)。Sobald die Ziele außer Reichweite sind, teach in kleines Warnzeichen aufdem Symbol des zieles auf![]() ,请参阅nächsten图片大小风。
,请参阅nächsten图片大小风。
目录möglich Simulationen als 3D HTML der 3D PDF zu exportieren sowie eine Station als vereinfachte Version von RoboDK (RoboDK Viewer) zu teilen。
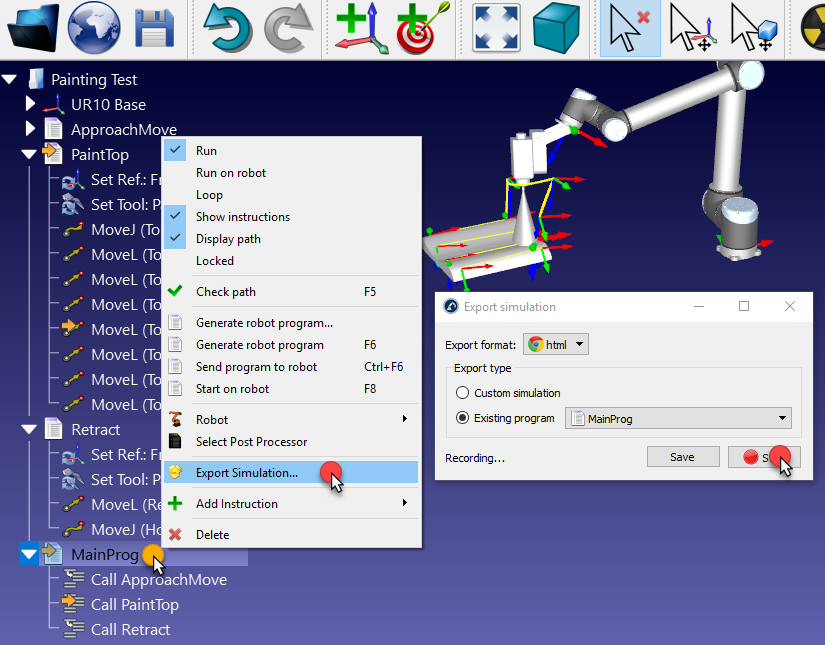
3D HTML和3D PDF documentente werden folgendermaßen erstellt:
1.Rechtsklick audas hauptprogram
2.民意调查您![]() 模拟Exportieren……
模拟Exportieren……
3.民意调查您开始。该程序可用于自动启动和模拟自动基因组,其程序可用于vollständig ausgefhrt wurde。
4.我爱你,爱你。研究方向:鸟类疾病自动诊断与控制系统
HTML-和PDF-Simulationen - werden也包括了inzelne datesechert。荷兰komprimeeren可以在HTML-Datei中找到Größe merklich reduziert werden。PDF-Simulationen msssen mit Acrobat Reader geöffnet werden。Das Exportieren des PDF-Formats list nur fgr windows - platformen verfgbar。
三维HTML仿真的模板链接:
●//www.sinclairbody.com/simulations/UR-Paint.html
●//www.sinclairbody.com/simulations/Welding-3-Fanuc-Robots.html
●//www.sinclairbody.com/simulations/Robot-Drawing.html
三维PDF仿真的模具折叠链接
●//www.sinclairbody.com/simulations/UR-Paint.pdf
●//www.sinclairbody.com/simulations/Welding-3-Fanuc-Robots.pdf
●//www.sinclairbody.com/simulations/Milling-with-External-Axes.pdf
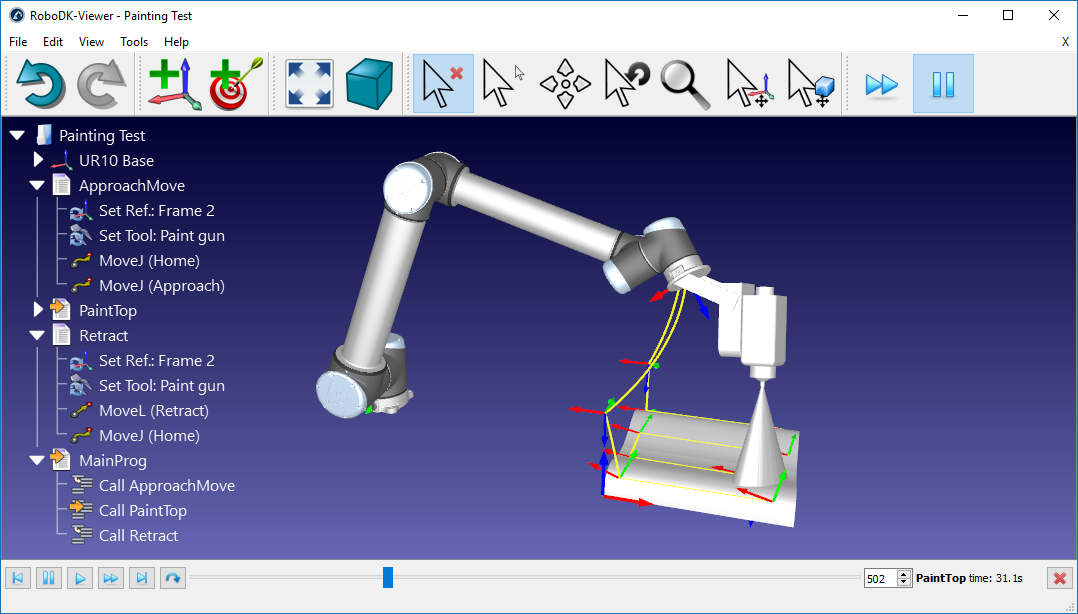
Eine weitere Möglichkeit, 3D-Simulationen zu exportieren, ist die erzeeugung einer selbstextrahierenden EXE-Datei oder einer ZIP-Datei mit einer reduzierten Version von RoboDK (nur f
要生成这个文件:
1.民意调查您Datei➔![]() Demostation erstellen
Demostation erstellen
2.Wählen Sie das bevorzugte Ausgabeformat (ZIP der EXE格式)
3.民意调查您Datei erstellen
Nach eigensekunden wind die gewnschte Datei (20mb) generiert。disese清单vereinfachte版本von RoboDK。模具工位自动送料。
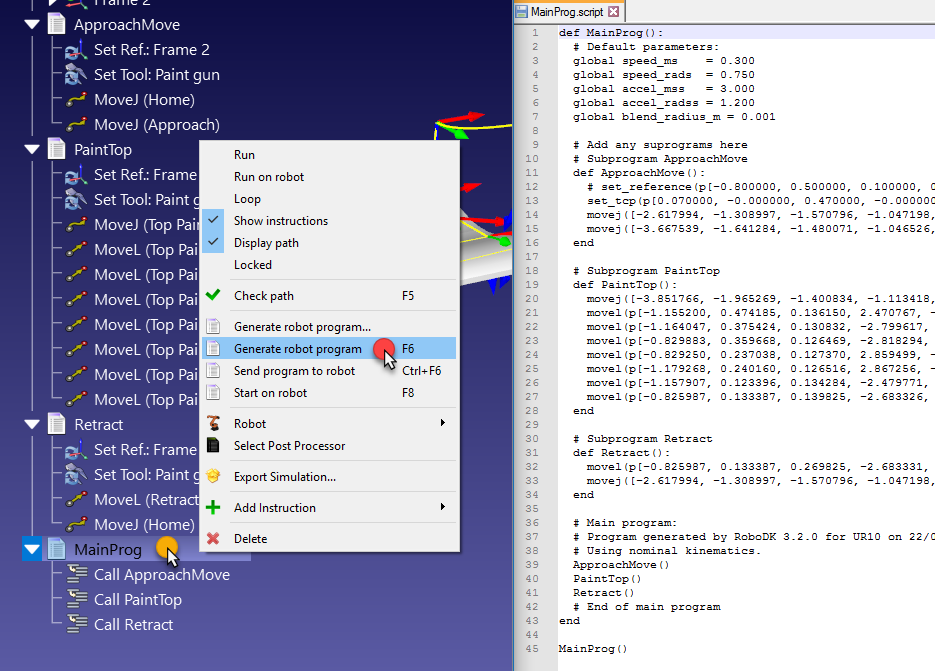
e ist möglich, jedes Programm einzeln oder der Hauptprogramm einschließlich der unterprogramzextieren:
1.Rechtsklick auf程序(MainProg那些)
2.民意调查您机器人程序手册(F6)
备选方案,können Sie机器人程序……wählen um den Speicherort zu bestmen。脚本程序
disese Datei list as Ergebnis des offline erstellten programs。Die Datei kann和Die Robotersteuerung gesendent werden, um dieselben Bewegungen auszufhren, Die in RoboDK simuliert wurden。
●民意调查您发送程序和机器人(Strg+F6)通过FTP发送的在线程序(离线编程)2022世界杯8强赛时间
●民意调查您自动机器人启动(F8): um ein Programm and den robot zu senden und auszufhren(离线编2022世界杯8强赛时间程)
●Wählen Sie die OptionAuf Roboter ausfhren[au:] [au:] [au:] [au:] [au:] [cn:] [au:] [cn:]die ermöglicht es, as program auf dem robot auszuf
Es ist möglich, den postprof prof r r ur - robot zu ändern and die Art and wise anzupassen, wie in program generiert ward:
1.Rechtsklick在程序中,在机器人中
2.民意调查您![]() 博士后教授auswählen
博士后教授auswählen
3.民意调查您通用的机器人
通用计算机程序管理系统。In diesem Beispiel verwendet der standard postprocessing achsspezifische Angaben/Gelenkwinkel, um jede lineare Bewegung zu definien, der zweite postprocessing verwendet kartesische Koordinaten, um jede lineare Bewegung zu definien。
Die RoboDK-API ermöglicht es, Simulationen beliebiganzupassen。Standardmäßig installert RoboDK Python和eine Reihe von Beispielmakros, die einen hohen Anpassungsgrad ermöglichen。大zu gehören模具仿真einer Lackierpistole,模具Programmierung von Robotern durch Python,模具仿真von 2d - camera,模具Konvertierung von SVG-Dateien in Roboterprogramme,模具自动化Einstellung eines tcp - abstes,模具仿真diskreter Ereignisse and vivees mehr。Es können auch andere Programmiersprachen verwendet werden, z.b.c #der Matlab。
//www.sinclairbody.com/doc/PythonAPI/intro.html
In diesem Beispiel f
1.民意调查您Datei➔![]() OffnenPython Makro zu öffnen (py文件)
OffnenPython Makro zu öffnen (py文件)
2.Navigieren Sie zu C:/RoboDK/Library/Macros/ um Beispiel Makros zu sehen
3.民意调查您SprayOn
4.民意调查您Offnen。新的Python对象![]() 将hinzugefugt。Dieses Makro ermöglicht模具仿真模型建模与建模与扩散
将hinzugefugt。Dieses Makro ermöglicht模具仿真模型建模与建模与扩散
5.“二重身”SprayOn马克罗和他的朋友们
6.民意调查您一个嗯,这是我的梦想
7.Halten Sie die Alt-Taste gedr
她的名字叫ssolten die Spur der Farbpistole sehen。Die Farbe and Die Transparenz sollent see je nachdem, wie nah oder fern der TCP bezglich der Oberfläche platziert ist, ändern。
Mit Hilfe von Esc können Sie die simulierte Farbe löschen。
8.“二重身”SprayOn程序和wählen Sie来自模具颗粒模拟。

Um besser zu verstehen,是hinter den Kulissen passiert, ist es möglich, den Python-Code folgendermaßen anzuzeigen oder zu bearbeen:
1.点击![]() SprayOn
SprayOn
2.民意调查您Python脚本之间
他的erscheint in neues Fenster (Texteditor) mit Code, der das Sprayverhalten modelliert and height,以及Python in RoboDK integritist。
模具喷淋模拟,
1.Wählen Sie die AnweisungAnfahrBewegung aufrufen
2.民意调查您programm➔![]() 方针aufrufen(1)新安卫星风力发电有限公司,新安卫星风力发电有限公司,新安卫星风力发电有限公司
方针aufrufen(1)新安卫星风力发电有限公司,新安卫星风力发电有限公司,新安卫星风力发电有限公司
3.民意调查您SprayOn (1)
4.Wählen Sie好的
5.Wiederholen Sie die gleichen Operationen wiederprogrammeinstellung OberflächeLackierenSprayOn (0),我们在der folgenden Abbildung的重量。
Ordnen Sie die anweissungen ggf。在“程序”页面中,通过拖放功能可以显示新功能。
6.夫人,您好MainProg程序来自。Nach zwei internationen solte das Ergebnis wie im Bild aussehen (mit normaler Geschwindigkeit simulieren)。

Es ist ebenfalls möglich neue Makros hinzuzuf
1.民意调查您programm➔![]() Python程序hinzuf
Python程序hinzuf
2.Klicken Sie mit der rechten maustastest of the new program and wählen SiePython脚本之间