RoboDK unterstütz die meisten standard 3D Formate, wie STL, STEP (STP) und IGES (IGS). Des Weiteren werden Formate wie WRML, 3DS oder auch OBJ unterstützt (STEP und IGES werden von der Mac und Linux Version nicht unterstützt).
Um eine neue 3D Datei zu importieren gehen Sie wie folgt vor:
1.Wählen SieDatei➔![Getting Started - Bild 15]() Öffnen
Öffnen
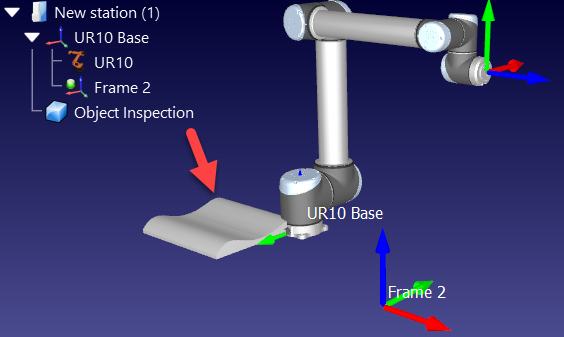
2.Wählen SieObjekt Untersuchung(verfügbar in der Standardbibliothek von RoboDK)
C:/RoboDK/Library/Object Inspection.
3.Alternativ können Sie Dateien via drag and drop in das Hauptfenster von RoboDK ziehen und somit automatisch importieren.
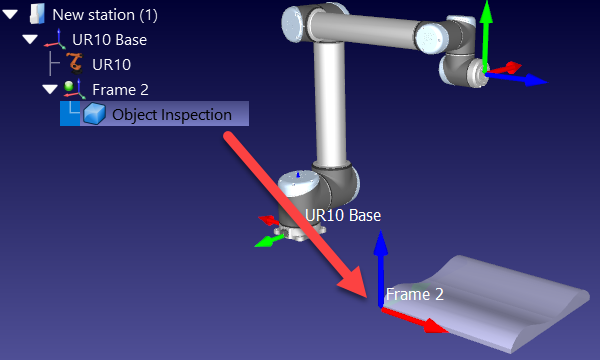
4.Drag & drop the object to the reference frameFrame 2(innerhalb des Stationsbaum)
Tipp:
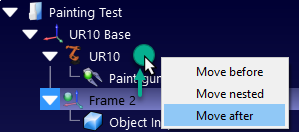
Bewgen Sie Objekte via drag & drop während Sie die rechte Maustaste gedrückt halten in den Stationsbaum. Die Objekte lassen sich dadurch im Baum anordnen.
Wichtig:
Es ist wichtig die Objekte untergeordnet in einem Bezugssystem in den Strukturbaum einzugliederen. Dies erlaubt es Ziele in Bezug zum Objekt zu teachen. Somit bewegen sich des Weiteren auch Ziele und Objekte mit, wenn ein Bezugssystem verschoben wird.
![Getting Started - Bild 16]()
Tipp:
Große STEP oder IGES Dateien können mit beschleunigten Import Einstellungen hinzugefügt werden. Gehen Sie hierzu wie folgt vor:
Extras➔Optionen➔CAD➔Schnell Import Einstellungen. Weiterführende Informationen finden Sie im AbschnittSTEP/IGES.
Tipp:
Obwohl Objekte in Relation zum Bezugssystem, an welches sie angeheftet sind bewegt werden können (indem man auf das Objekt doppelklickt und die Koordinaten eingibt), wird es empfohlen diese immer durch bewegen ihres Bezugssystems, mitzubewgen. Dies erlaubt es die Objektreferenz zu bewegen, indem man nur das Bezugssystem vom Roboter Controller aus aktualisiert.
![Getting Started - Bild 17]()
![Getting Started - Bild 18]()