Einführung
Ein Bezugssystem erlaubt es Objekte in Bezug zu einem Roboter oder anderen Objekten im 3D Raum zu platzieren (inklusive Position und Orientierung).
Um ein neues Bezugssystem einzufügen gehen Sie wie folgt vor:
1.Wählen SieProgramm➔![]() Bezugssystem hinzufügen
Bezugssystem hinzufügen
Alternativ können Sie das zugehörige Icon der Symbolleiste verwenden
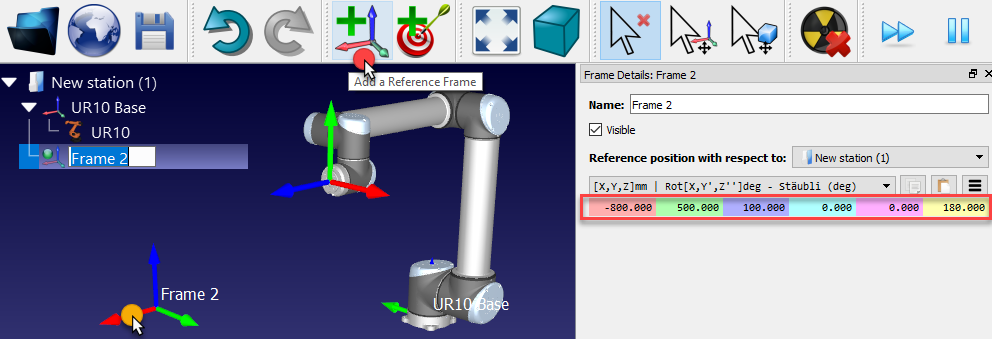
2.Doppelklicken Sie auf das Bezugssystem (im Strukturbaum oder in der 3D-Geometrie auf dem Hauptbildschirm), um die im Bild angezeigten Koordinaten einzugeben (X-, Y-, Z-Position und Euler-Winkel für die räumliche Orientierung). Mittels Mausrad kann die Position des Bezugssystems auf dem Hauptbildschirm schnell verändert werden. Hierzu muss der Mauszeiger über dem jeweiligen Wert sein.
Die folgenden Farben werden standardmäßig verwendet:
●X Koordinate➔Rot
●Y Koordinate➔Grün
●Z Koordinate➔蓝色
●1. Euler Winkel➔Zyan
●2. Euler Winkel➔Magenta
●3. Euler Winkel➔Gelb
3.Wählen SieAnsicht➔Bezugssysteme vergrößern (+)恩迪e Bezugssysteme zu vergrößeren
4.Wählen SieAnsicht➔Bezugssysteme verkleinern (-)恩迪e Bezugssysteme zu verkleinern
5.Wählen SieAnsicht➔Anzeigen/verstecken von Text (/)um Text anzuzeigen / zu verstecken
6.Optional können Sie Bezugssysteme oder Objekte im Baum mittelsF2umbenennen
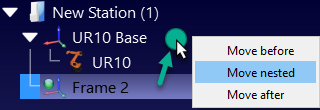
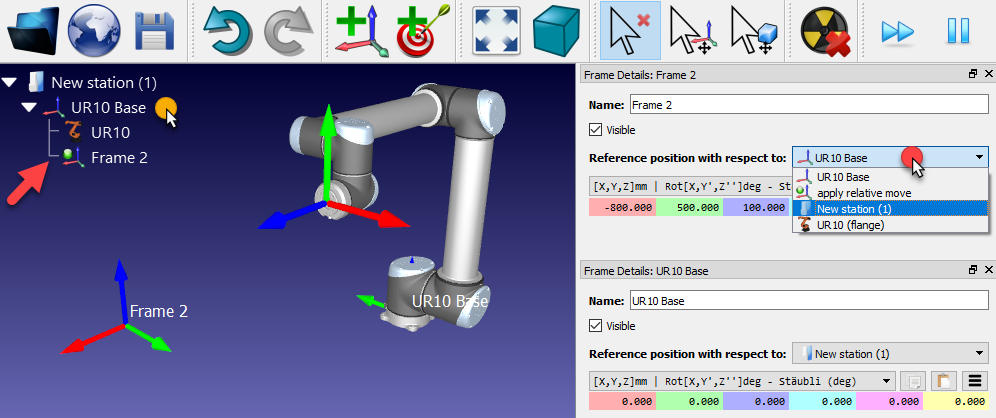
Wenn mehrere Bezugssysteme verwendet werden, ist es möglich, diese innerhalb der Stationsstruktur mittels drag and drop zu bewegen, um die realen Abhängigkeiten und Beziehungen herzustellen. Zum Beispiel kann das Bezugssystem 2 in Bezug auf die Roboterbasisreferenz platziert werden. In diesem Fall wird auch das Bezugssystem 2 mitbewegt, wenn die UR10-Basis verschoben wird. Es ist wichtig, dies zu berücksichtigen, wenn andere Roboter oder Referenzrahmen verwendet werden. Das nächste Bild zeigt diesen Unterschied bezüglich der Abhängigkeit von Objekten.
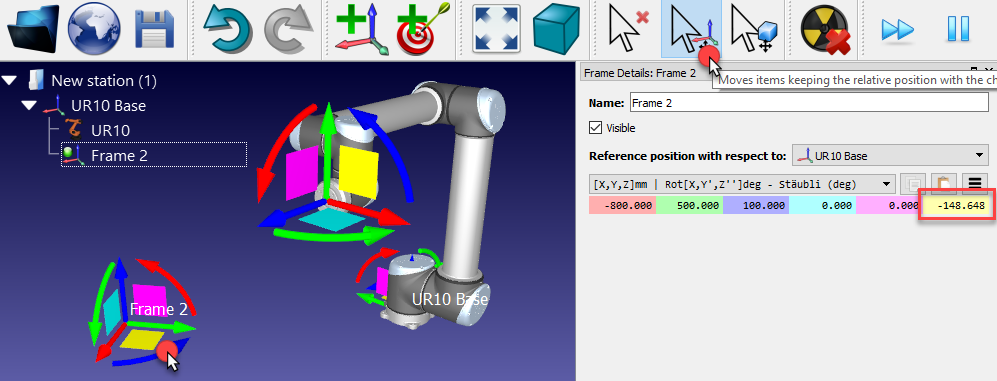
年代elbst wenn die Abhängigkeit unterschiedlich ist, ist es immer noch möglich, die Koordinaten irgendeines Bezugssystems in Bezug auf irgendein anderes Bezugssystem einzugeben oder abzurufen. Dies wird im nächsten Bild gezeigt. Die meisten Robotersteuerungen benötigen die Koordinaten des Bezugssystems in Bezug auf die Roboterbasis.
Bezugssysteme können auch im Hauptbildschirm bewegt werden, indem manAltgedrückt hält oder das zugehörige Icon der Symbolleiste verwendet![]() . Ziehen Sie dann die Referenz mit der Maus vie drag and drop über den Bildschirm. Wenn die Referenz verschoben wird, werden die entsprechenden Koordinatenwerte aktualisiert.
. Ziehen Sie dann die Referenz mit der Maus vie drag and drop über den Bildschirm. Wenn die Referenz verschoben wird, werden die entsprechenden Koordinatenwerte aktualisiert.