Einführung
Die Funktion "Ziele auf Oberfläche erstellen" ist nützlich für Anwendungen wie z.B. Lackieren oder Inspizieren von Bauteilen:
1.Wählen SieProgramm➔![]() Ziel(e) auf Oberfläche teachen(Strg+Shift+T)
Ziel(e) auf Oberfläche teachen(Strg+Shift+T)
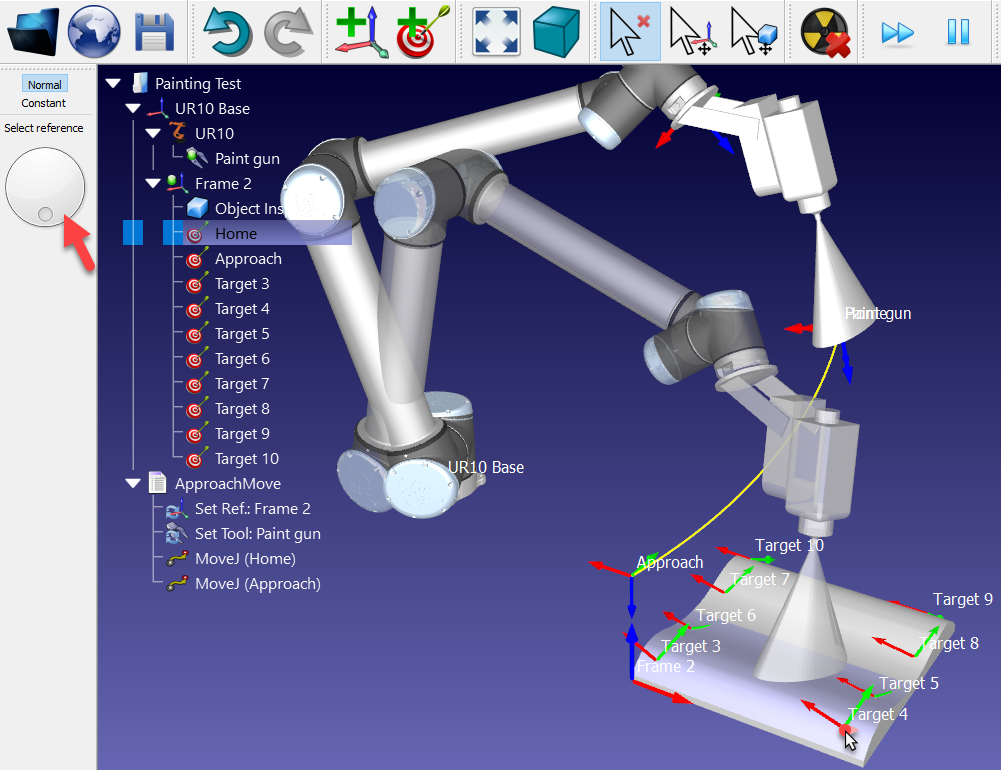
2.Bewegen Sie den Mauszeiger über das Teil, um eine Vorschau zu erhalten, wie der Roboter aussieht, wenn er das Teil erreicht.
3.Wählen Sie einige Punkte auf dem Objekt aus (Linksklick). Jeder Mausklick mit der linken Maustaste definiert ein neues Ziel, während die Z-Achse des TCP normal/senkrecht zur Oberfläche bleibt.
4.Passen Sie ggf. die Ausrichtung um die Z-Achse an, indem Sie das Rad auf der linken Seite bewegen oder die linke/rechte Pfeiltaste verwenden.
5.Halten SieAltum ein existierendes Ziel zu bewegen
6.Halten SieAlt+Shiftum ein existierendes Ziel auf der Oberfläche zu bewegen
7.Verwenden SIe Esc key oder einen Rechsklick auf den Bildschirm und wählen SieFertigum keine weiteren Ziele zu erstellen.
Erstellen Sie, sobald die Ziele erstellt wurden, ein Programm mit den folgenden Schritten:
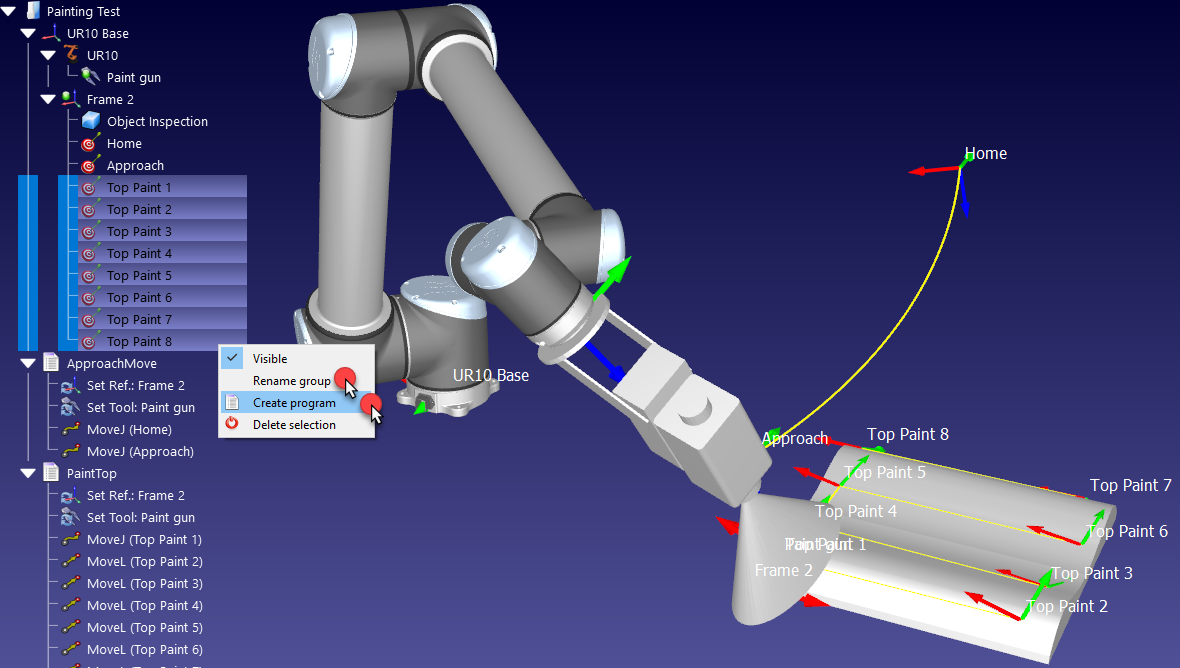
1.Wählen Sie alle Ziele auf der Oberfläche und klicken Sie mit der rechten Maustaste
2.Wählen SieGruppe umbenennenaus dem sich aufklappenden Menü
3.Geben SieOberflächeLackierenein. Alle ausgewählten Ziele werden umbenannt und nummeriert.
4.Klicken Sie erneut mit der rechten Maustaste auf die Ziele und wählen SieProgramm erstellenaus. Ein neues Programm wird generiert. Die erste Bewegung wird eine PTP Bewegung sein, die folgenden Bewegungen werden linear ausgeführt
5.Wählen SieF2um das Programm inOberflächeLackierenumzubenennen.
6.Doppelklicken Sie auf dasOberflächeLackierenProgramm um die Simulation auszuführen
7.Falls erforderlich, ordnen Sie die Bewegungen/Befehle innerhalb des Programms durch Ziehen an.