Einführung
Es ist möglich, einen zweiten TCP in Bezug auf den ersten zu platzieren, beispielsweise um einen gegebenen Abstand zu definieren oder einen Fräser in Abhängigkeit zu einer Spindel am TCP zu platzieren.
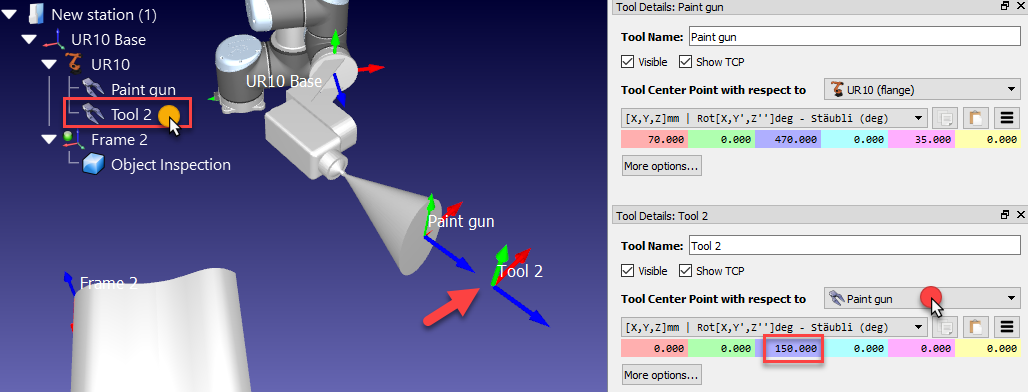
Die folgenden Schritte beschreiben den Vorgang, wie ein zweiter TCP in Bezug auf den ersten um 150 mm entlang der Z-Achse verschoben hinzugefügt wird:
1.Rechtsklicken Sie auf den Roboter
2.Wählen Sie![]() Werkzeug hinzufügen (TCP). Ein neues Objekt, Tool 2, erscheint.
Werkzeug hinzufügen (TCP). Ein neues Objekt, Tool 2, erscheint.
3.Doppelklicken Sie auf den neuen TCP
4.Wählen SieTool Center Point in Bezug auf➔Lackierpistole
5.Geben Sie für die Z Koordinate 150 mm und setzen Sie sämtliche anderen Translationen und Rotationen gleich 0.
Dieser neue TCP, welcher relativ zum zuvor definierten TCP platziert wurde, wird in den folgenden Schritten entfernt: