Einführung
Ähnlich wie bei den vorherigen Operationen:
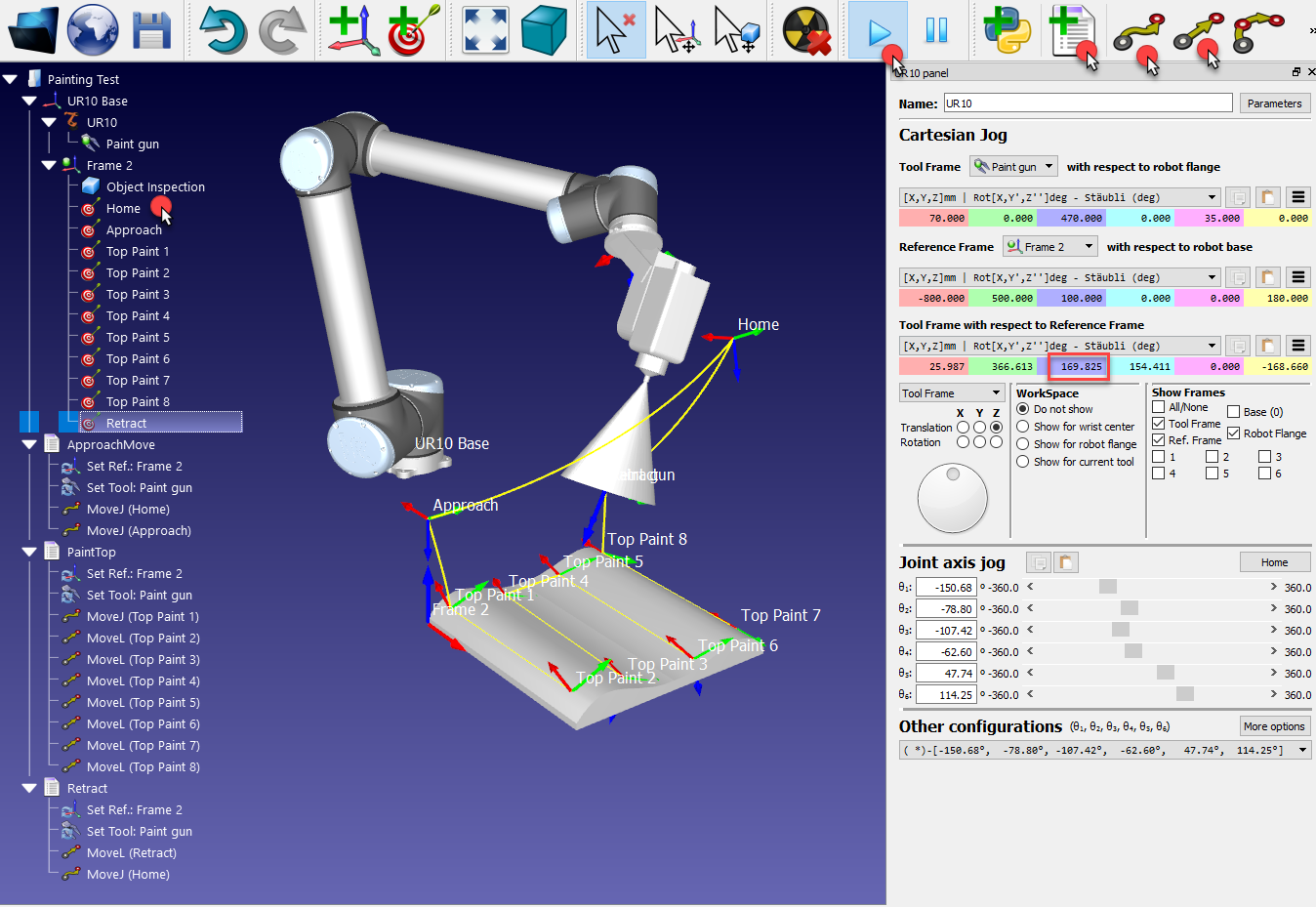
1.Wenn der Roboter am letzten Ziel angekommen ist, bewegen Sie den Roboter nach oben, indem Sie die Z-Koordinate des TCP in Bezug auf das Referenzsystem im Roboterbedienfeld erhöhen (markiertes Kästchen im nächsten Bild).
2.Wählen SieProgram➔![]() Programm hinzufügen,奥得河das der Symbolleiste gleichwertige图标。
Programm hinzufügen,奥得河das der Symbolleiste gleichwertige图标。
3.Wählen SieProgramm➔![]() Linearbewegung, oder das gleichwertige Icon der Symbolleiste
Linearbewegung, oder das gleichwertige Icon der Symbolleiste![]() . Benennen Sie es inRückzugmittels derF2Taste um.
. Benennen Sie es inRückzugmittels derF2Taste um.
4.Wählen Sie das ZielHomeaus.
5.Wählen SieProgramm➔![]() Point to Point Bewegung. Es wird eine neue Bewegungsanweisung hinzugefügt, die mit dem Home Ziel verknüpft ist.
Point to Point Bewegung. Es wird eine neue Bewegungsanweisung hinzugefügt, die mit dem Home Ziel verknüpft ist.
Simulieren Sie jedes Programm einzeln, indem Sie darauf doppelklicken. Die Simulation kann beschleunigt werden, indem Sie die Leertaste gedrückt halten oder das Icon Schnelle Simulation auswählen![]() /
/![]() .
.