Einführung
Folgen Sie diesen Schritten, um ein Programm zu erstellen das aus derHomein dieAnfahr Positionfährt:
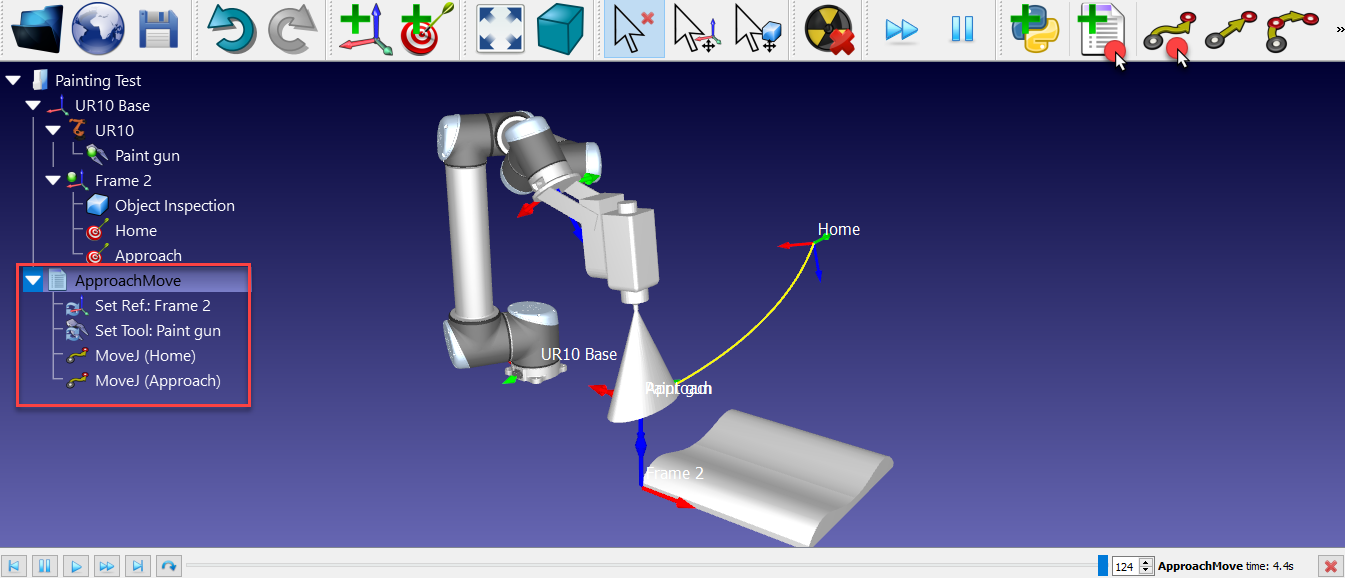
1.Wählen SieProgramm➔![]() Programm hinzufügenaus dem Menü oder klicken Sie auf das zugehörige Icon der Symbolleiste (s. Abb.).
Programm hinzufügenaus dem Menü oder klicken Sie auf das zugehörige Icon der Symbolleiste (s. Abb.).
2.Benennen Sie das Programm inAnfahrBewegungum
3.Wählen Sie dasHomeZiel
4.Wählen SieProgramm➔![]() Point to Point Bewegungsanweisung(oder das zugehörige Icon der Symbolleiste). Zwei Anweisungen werden automatisch hinzugefügt, um dem Roboter mitzuteilen, welches Werkzeugsystem und welches Basissystem verwenden wird.
Point to Point Bewegungsanweisung(oder das zugehörige Icon der Symbolleiste). Zwei Anweisungen werden automatisch hinzugefügt, um dem Roboter mitzuteilen, welches Werkzeugsystem und welches Basissystem verwenden wird.
5.Wählen Sie dasAnfahrZiel
6.Wählen Sie erneutProgramm➔![]() Point to Point Bewegungsanweisung
Point to Point Bewegungsanweisung
Doppelklicken Sie auf das ProgrammAnfahrBewegung, um die Programmsimulation auszuführen. Der Simulationsbalken und eine geschätzte Zykluszeit werden angezeigt