Einführung
Es ist möglich Simulationen als 3D HTML oder 3D PDF zu exportieren sowie eine Station als vereinfachte Version von RoboDK (RoboDK Viewer) zu teilen.
3D HTML und 3D PDF Dokumente werden folgendermaßen erstellt:
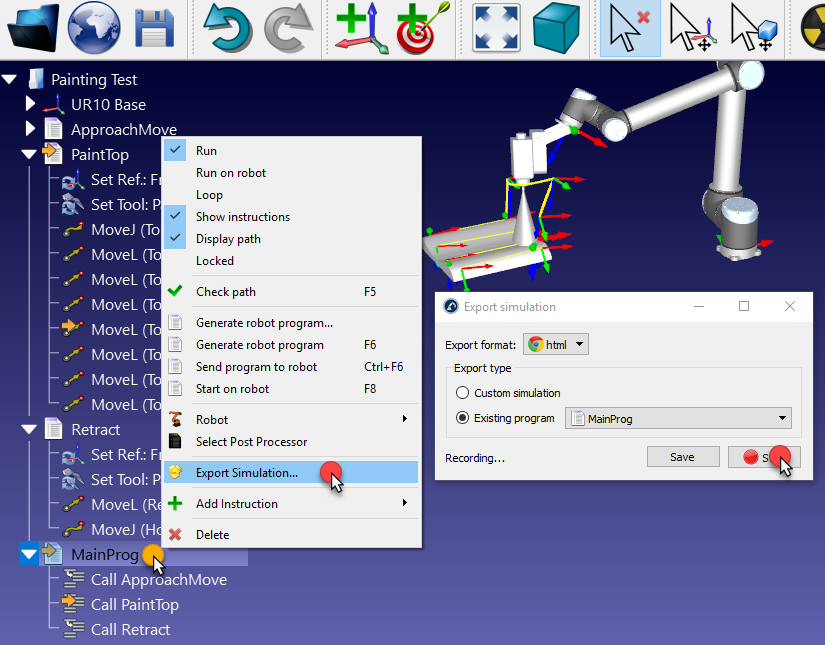
1.Rechtsklick auf das Hauptprogramm
2.Wählen Sie![]() Simulation Exportieren…
Simulation Exportieren…
3.Wählen SieStart. Das Programm wird gestartet und die Simulation wird aufgenommen, bis das Programm vollständig ausgeführt wurde.
4.Sichern Sie die Datei. Nach dem Speichern wird diese automatisch für eine Vorschau geöffnet.
HTML- und PDF-Simulationen werden als eine einzelne Datei gespeichert. Durch Komprimieren kann eine HTML-Datei in ihrer Größe merklich reduziert werden. PDF-Simulationen müssen mit Acrobat Reader geöffnet werden. Das Exportieren des PDF-Formats ist nur für Windows-Plattformen verfügbar.
Die folgenden Links sind Beispiele von 3D HTML Simulationen:
●//www.sinclairbody.com/simulations/UR-Paint.html
●//www.sinclairbody.com/simulations/Welding-3-Fanuc-Robots.html
●//www.sinclairbody.com/simulations/Robot-Drawing.html
Die folgenden Links sind Beispiele von 3D PDF Simulationen:
●//www.sinclairbody.com/simulations/UR-Paint.pdf
●//www.sinclairbody.com/simulations/Welding-3-Fanuc-Robots.pdf
●//www.sinclairbody.com/simulations/Milling-with-External-Axes.pdf
Eine weitere Möglichkeit, 3D-Simulationen zu exportieren, ist die Erzeugung einer selbstextrahierenden EXE-Datei oder einer ZIP-Datei mit einer reduzierten Version von RoboDK (nur für Windows-Version verfügbar). Dies ist im nächsten Bild zu sehen.
To generate this file:
1.Wählen SieDatei➔![]() Demostation erstellen
Demostation erstellen
2.Wählen Sie das bevorzugte Ausgabeformat (ZIP oder EXE Format)
3.Wählen SieDatei erstellen
Nach einigen Sekunden wird die gewünschte Datei (20 MB) generiert. Diese ist eine vereinfachte Version von RoboDK. Die Station wird automatisch beim Start geladen.