Die Geometrie des Werkzeugs ist möglicherweise nicht richtig in Bezug auf den Roboterflansch ausgerichtet, wenn dieses in RoboDK geladen wird. Die folgenden Schritte gehen davon aus, dass ein Fehler gemacht wurde und das Werkzeug um 180 Grad um die Z-Achse verdreht montiert wurde. Die notwendige Korrektur wird nachfolgend gezeigt:
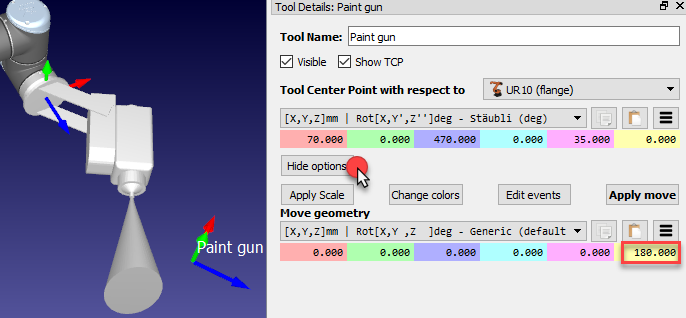
1.Wählen Sie weitere Optionen im Detail Fenster des Werkzeugs
2.Geben Sie 180 im gellben Feld (Z Rotation) der Lackierpistolen Geometrie ein (siehe Bild). Das Mausrad kann ebenso benutzt werden um Werte schnell anzupassen.
![Getting Started - Bild 26]()
Tipp:
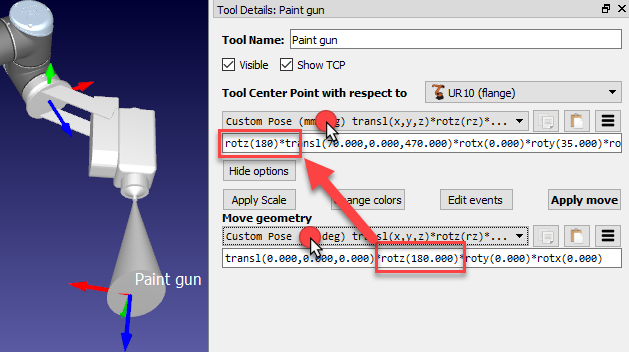
Wenn der TCP vor dieser Operation definiert wurde, stimmt er nicht mehr mit der Geometrie überein. Um die Position des TCP korrekt zu aktualisieren können Sie entweder den Schritten die zu Beginndieses Kapitelsbeschrieben wurden folgen (indem Sie Alt gedrückt halten oder die Werte manuell eingeben). Alternativ könnten wir den TCP um den Roboterflansch rotieren, indem wir die Benutzerdefinierte Pose auswählen (siehe nächstes Bild) und die Z-Rotation einfügen, um welche der TCP gedreht werden soll.
![Getting Started - Bild 27]()
Anmerkung:
Weiterführende Informationen wie man Transformationen und Rotationen durchführt sind in dem KapitelBezugssystemeverfügbar.