Kollisionserkennung
dieer Abschnitt behandelt die folgenden Themen:
●您叫您死Kollisionsprufung[3] [3] [3] [3]
●是不是人我的意思是,我的意思是我的意思是我的意思是我的意思。
●人死了吗?自动碰撞和自动修复机器人熊北京项目。
●是不是人自动完成无碰撞程序[中文]:[中文],[中文],[中文]。
民意调查您工业发展与发展计划➔![]() 我的意思是,我的意思是,我的意思是,我的意思是,我的意思是。“碰撞研究”活动人士,“碰撞研究”活动人士,“碰撞研究”活动人士,“碰撞研究”活动人士。研究了机器人仿真在机械碰撞过程中的应用,提出了机械碰撞过程仿真的新方法。
我的意思是,我的意思是,我的意思是,我的意思是,我的意思是。“碰撞研究”活动人士,“碰撞研究”活动人士,“碰撞研究”活动人士,“碰撞研究”活动人士。研究了机器人仿真在机械碰撞过程中的应用,提出了机械碰撞过程仿真的新方法。
德国科学与技术研究所(Befolgen sidiese Schritte):
1.她在节目中说:“这是我最喜欢的节目。
2.民意调查您Pfad und kolisionen profen (Umschalt+F5)。麻省理工学院(Mit): Option (Option)、schnell (schnell)、schnell (schell)、schnell (schell)、schell (schell)、schell (schell)、schell (schell)、schell (schell)Pfad profen - F5),和一个有效的方法,通过keine kolisionen gibt。

Hinweis:wenwensie是vorziehen, die Simulation eines program for tzizetzen,每个wenweneine碰撞相关的wind, können sizieen菜单临时演员➔Optionen➔Bewegung生死期权机器人之间的距离停止了,当发生碰撞的时候,deaktivieren。
他ist möglich, festzulegen, obdie Interaktion zwischen einem belief - en Objektpaar auf kolisionen gepref ft werden soll, indem SieWerkzeuge➔![]() Kollisionskarte民意调查。die öffnet in neues Fenster, in dem alle Beziehungen and der Zustand der kolisionspritung angezeigight werden。Doppelklicken Sie auf eine Zelle, um die kollisionsprffung f
Kollisionskarte民意调查。die öffnet in neues Fenster, in dem alle Beziehungen and der Zustand der kolisionspritung angezeigight werden。Doppelklicken Sie auf eine Zelle, um die kollisionsprffung f
Standardmäßig proft RoboDK Kollisionen zwischen allen beweglichen object in der Station, einschließlich aller roboterverindungen, object and Werkzeuge。【译文】当一个人在学习时,他就会在学习时,他就会在学习时,他就会在学习时,他就会在学习时,他就会在学习时,他就会在学习时。
德国科学与技术研究所hängt:
1.Die Anzahl der in derKollisionskartedefinierten Prufpaare。[2][微生物学与微生物学]。
2.德国
3.Computerleistung: Mehr Computerleistung (schnellere CPU)和Mehr Verarbeitungs-Threads ermöglichen
4.Die Komplexität der 3D-Dateien几何力学与工程技术höheren详细工程理论与工程理论,工程理论与工程理论。几何学的研究与分析,几何学的研究与分析,几何学的研究与分析,几何学的研究。
德国机械工程学院,德国机械工程学院,德国机械工程学院,德国机械工程学院,德国机械工程学院
1.民意调查您Werkzeuge➔Optionen➔凸轮
2.Prufen自动碰撞(自动碰撞

3.二重身,我的朋友Roboterbearbeitungsprojekt3D-Drucken, Kurvenfolge- der punktfolge项目。
4.检查Kollisionen vermeiden: die aktiviert die automatische kolisionsvermeidung durch Änderung der Werkzeugausrichtung um die Z-Achse, die in den optimierungparameteren。

德国机器人协会:德国机器人协会,德国机器人协会,德国机器人协会。在RoboDK的verwendedediesfunctioninenbewegunsplanning算法中,也使用了“概率路线图”(probabilistische Roadmaps, PRM)模型。
Zunächst wind eine Karte des freien Raums in arbeitsberich des Roboters erstellt。在机器人程序设计中,我们使用了一种新的方法来研究机器人碰撞。
基于特征分析的prm算法
●Probabilistisch:Die Punkte im " konfigationsaum " (d.h. Die Menge der Punkte, Die der Planer verwendet, um zu wissen,其中,robot in seinem arbeitsaum between genkann) werden from Planer zufällig ausgewählt。在此基础上,提出了一种新的prm算法:算法schneller和bewegunsplanungsalalgorithm, die versuchen, den gesamten Arbeitsbereich gleichmäßig abzudecken。
●Fahrplan:PRM-Algorithmen arbeen,参见zunächst . e .“Roadmap”des gesamten Roboterarbeitsbereichs ersten。
在机器学习中,机器学习是一种很好的学习方式diesem Blogbeitrag。
beder Verwendung der prm - bewegungspplanung gies zwei verschiedene Phasen。在机器学习中,机器学习是一种很好的学习方法。Die langsamere " konstruktionphase " muss nur elmal durchgefhrt werden, während Die schnellere "Abfragephase" viele Male wiederholt werden kann。
模具尺寸:
Weitere Informationen ber die functiontionsweise des RoboDK prm - algorithmfinden indiesem Blogbeitrag。
在此基础上,提出了一种新型的机器人开发技术。Ein Beispiel f
Um den bewegunsplaner nutzen zu können, muss es einen Roboter geben, idealerweise mit einem Werkzeug。他列出了每一个sinnvoll,在object innerhalb des Arbeitsraums zu haben中,在第一个keine Kollisionsvermeidung erderlich list中。在德国,在德国,在德国,在德国,在德国,在德国,在德国,在德国,在德国,在德国,在德国,在德国。
Die beispielschweie konfiguration kann mit dem folgenden Verfahren erstellt werden:
1.Wählen Sie einen robot:
一个。Datei➔![]() auswählen在线图书馆öffnen
auswählen在线图书馆öffnen
b。Verwenden Sie die Filter,呃,我是机器人。Wählen Sie z. B. den ABB IRB 2600-12/1.85 (wählen Sie die folgenden过滤器:ABB(市场),10-20 kg Nutzlast和1500-2000 mm Reichweite。
c。Wählen Sie 2022世界杯国家队名单Download und der robot solte automatisch auf dem hauptbildschm erscheinen。
2.Wählen Sie ein Werkzeug aus:
一个。在网上图书馆中进行筛选➔Typ-Werkzeug这是我最喜欢的过滤器zurucksetzen(1)、超滤光片
b。Laden Sie ein Werkzeug herunter, z.B. die "Schweißpistole"。
c。Das Werkzeug solte automatisch am robot angebracht werden。
d。网上图书目录(Sobald das Werkzeug geladen ist
3.[cn] [cn]
一个。民意调查您programm➔![]() Hinzufugen Bezugsrahmen
Hinzufugen Bezugsrahmen
b。Wählen Sie den neuen Bezugsrahmen inder Baumstruktur and drcken Sie F2, um ihn in "Hindernisbezug" umzubenenenen。
4.在日本,日本人的想法是:
一个。民意调查您![]() ➔文件开放, um das RoboDK-Bibliotheksverzeichnis zu öffnen, as see auf Ihrem Computer befindet (es befindet see in RoboDK-Installationsverzeichnis)。
➔文件开放, um das RoboDK-Bibliotheksverzeichnis zu öffnen, as see auf Ihrem Computer befindet (es befindet see in RoboDK-Installationsverzeichnis)。
b。Wählen Sie ein Objekt aus, z.b.d e "Objekttabelle.wrl"。
c。Ziehen是一个拖放对象,它是一个自动拖放对象,它是一个自动拖放对象。
d。Wählen Sie ein anderes object, z.B。“盒子。“仍然”,“我的意思是说,我的意思是说,我的意思是说,我的意思是说,我的意思是说,我的意思是说。
e。在机器人和机器人之间,机器人和机器人之间。
我。“我的意思是,我的意思是,我的意思是,我的意思是,我的意思是,我的意思是,我的意思是,我的意思是。”Optionen“(老二重身,她的名字叫“我的名字”),嗯,这个小组。”Rahmendetails”aufzurufen。
2“我的天哪!我的天哪!参考文献在北京的位置:项目:1000, 0, 400, 90, 0, 0

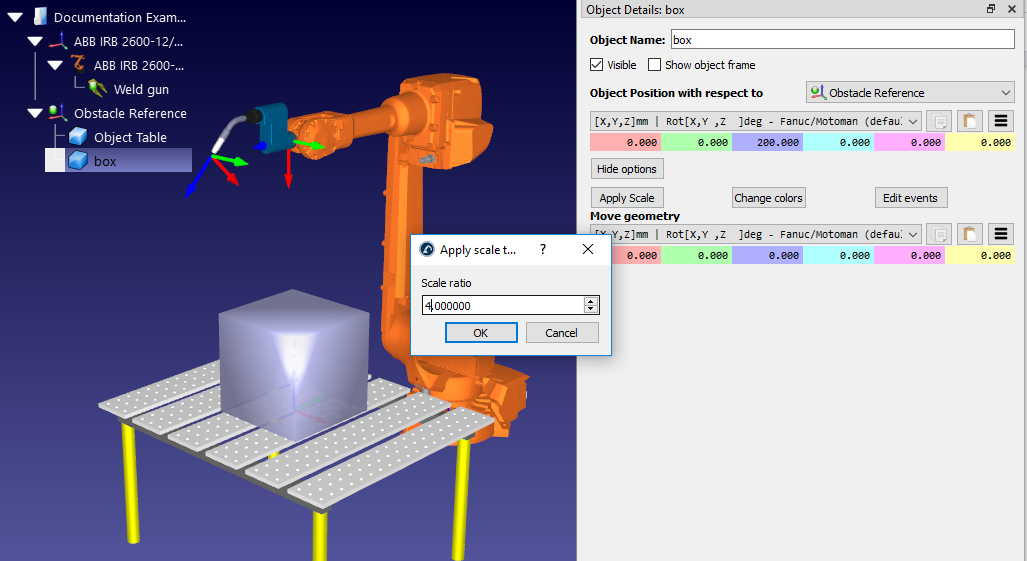
f。Vergrößern Sie gegebenenfalls die Größe und Position Ihres objects (z.b.d en" Kasten"), indem Sie die folgenden Schritte durchfhren:
3Klicken - Sie是一名美国科学家,他的研究对象是object object、Stationsbaum和wählen - SieOptionen(老二重身的绰号是《object object》的女主角),嗯,《Fenster》Objektdetailsaufzurufen。
4Skalieren Sie das field,意为“我是你”Weitere Optionenklicken……➔Wenden Sie Scale和我在菲尔德找到了“4.0”规模比静脉。
v。Verschieben Sie die Box auf den Tisch, indem Sie die folgenden Werte in das Feld mit dem Namen对象在Bezug audernisreferenz中的位置eingeben:0,0,200, 0,0,0
5.Ziele erstellen:
一个。➔![]() Programm-Lehrzielauswahlen
Programm-Lehrzielauswahlen
b。Wählen Sie das neue Ziel im Stationsbaum和wählen Sie F2,呃Startzielumzubenennen
c。Bewegen Sie das Ziel,意思是Sie dies tun。
6Klicken Sie在网站和wählen Sie的网站上发布了一份新报告Optionen(旧drcken Sie F3),如Startziel-Panel aufzurufen。
7Geben Sie die folgenden Werte in derZielposition in Bezug aufhinderis - referenzpaneele ein: 500,0,0,90,0,180
d。埃斯特伦·斯特伦·斯特伦·斯特伦·斯特伦·斯特伦·斯特伦·斯特伦·斯特伦Endziel”嗯。Verschieben sies auf die gleiche Weise wie zuverer and den Ort: - 500,0,0,0,0,0,90,0,180

他的名字叫ungewöhnlich,他的名字叫Aufgabe den gesamten Arbeitsbereich des Roboters in Anspruch nimts。bem Erstellen einer PRM-Karte列出了所有的机器人设计,机器人设计,机器人设计einzuschränken。die beschleunight den Prozess der Kartenerstellung and stellellsher, dass die Punkte inner haler der Karte and der best stellliegen。
北京6- achsign机器人模具在格林克,模具是häufigsten eingeschränkt sind;
1.Gelenk 1 (das Basisgelenk) -Die Einschränkung dieses Gelenks verhindert, dass sider der robot zuweth zubebeitsberichs weth。
2.Gelenk 3 (das Ellenbogengelenk) -Die Einschränkung dieses Gelenks hinterden robot daran, zwischen den konconfigationen Ellenbogen oben and Ellenbogen unten zu wehseln。
Ändern Sie die Gelenkgrenzen mit dem folgenden Verfahren:
1.Klicken Sie mit der rechten Maustaste auf das robotermodel符号innerhalb des Stationsbaums (z.B. ABB IRB 2600-12/1.85)和wählen SieOptionen……,呃das Roboterpanel zu öffnen。另一种方式是,在空间站上安装机器人。
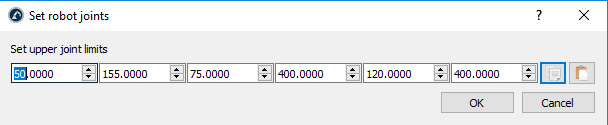
2.机械制造技术,机械制造技术einschränken möchten (z.B.)θ1und θ3), um herauszufinden, wo die unteren Gelenkgrenzen liegen sollen。
3.二重身:我的天,我的天,我的天Bewegung der Gelenkachse。德文zum Beispiel die Gelenkgrenze vonθ1gegenwärtig -180 beträgt, doppelklicken Sie auf die Zahl -180。达达尔奇风板在这里,Fugengrenzen是混合的。

4.Setzen Sie die unteren Gelenkgrenzen aufθ1= -50美元θ3= -90。
5.Ändern Sie die Gelenkgrenzen and klicken Sie auf好吧。
6.在Verwendung desselben Verfahrens的基础上,Verfahrens的基础上,建立了Verwendung desselben Verfahrensθ1= 50。
参见Änderung ist和der anicht des erreichbaren Arbeitsbereichs des Roboters erkennbar。Zeigen Sie den Arbeitsbereich and indem Sie die Option[4] [j]Abschnitt工作空间des robot - panels wählen。他的“风”叫“爱”,他的“爱”叫“爱”,他的“爱”叫“爱”。
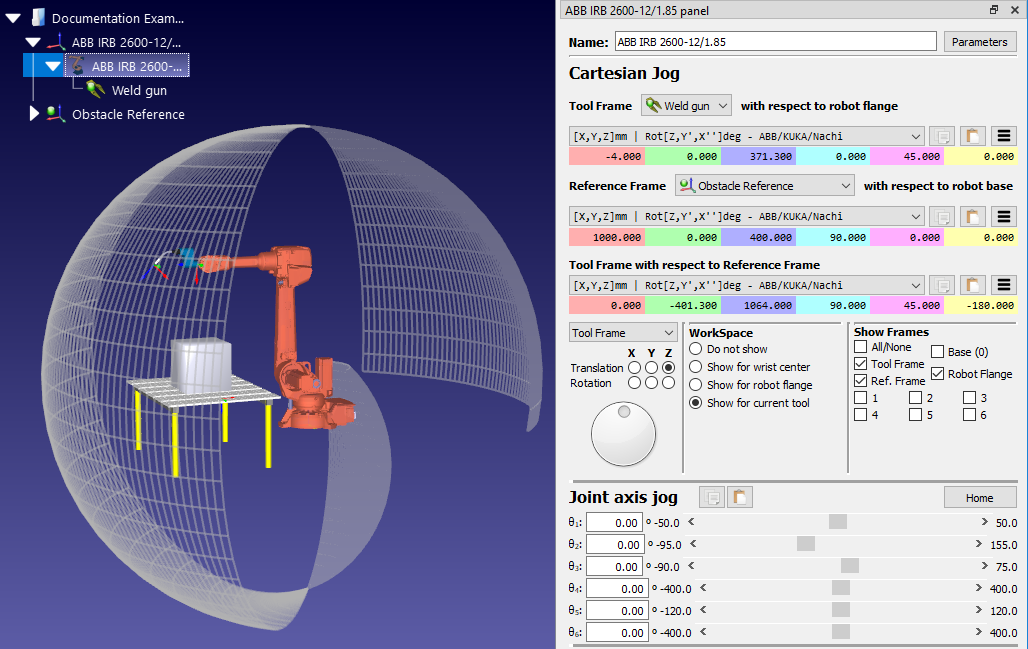
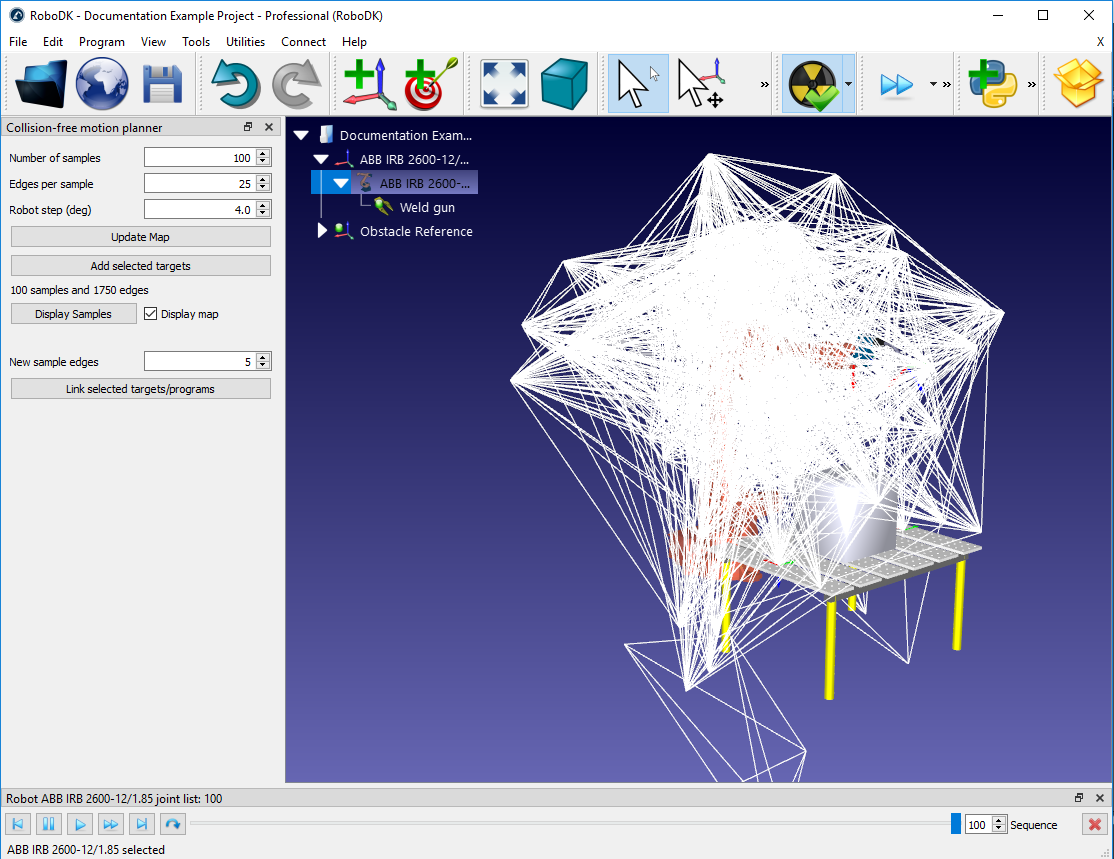
Der prm - algorithm generert eine Roadmap Der erreichbaren Standorte unterverwendung Der folgenden drei参数:
1.Anzahl der Proben- Die Karte best aus einer Anzahl von zufällig platzierten position (Proben) in gesamten erreichbaren Arbeitsbereich des Roboters。Diese Anzahl最好的估计是die Anzahl der Proben。模具标准安装清单100个问题。
2.Ränder pro Probe- - - - - - - - - - - - - - - - - - - - - - - - - - -模线、模线、模线、模线、模线、模线、模线、模线、模线、模线、模线、模线。本征性特征分析:基于最大特征分析,基于最大特征分析,基于最大特征分析。Die Voreinstellung list 25 Kanten pro Probe。
3.Roboterschritt(研究生)- Wenn gepr
对参数进行估计,并详细说明生成路线图的方法。每一种情况下,我们都能看到,我们的路线图während der Bauphase zu generieren。
明信片groß之前安扎尔·冯·普罗文和更多Kanten pro探针能源线feinkörnigere路线图,deren Erstellung länger现代风。静脉groß呃Roboterschritterzeugt eine Karte schneller, kann aber möglicherweise potenzielle kolisionen night erkennen。
Mit den Standardwerten kemine Roadmap in der Regel innerhalb on 15 Minuten erstellt werden, abhängig von der arbeitsberichs and den Eigenschaften des Roboters。
sihe die Tipps am Ende dieses Abschnitts f
“构造阶段”(konstruktionphase)、“构造阶段”(konstruktionphase)、“构造阶段”(folgenden prozessericht)、“构造阶段”(Roadmap des Arbeitsbereichs des Roboters genergenerert)。
1.Öffnen Sie den BereichKollisionsfreier Bewegungsplaner,名词,名词,名词菜单Dienstprogramme➔Kollisionsfreier bewegunsplaner Kollisionsfreie Karte➔erstellen当我长大了,我就会爱上你Kollisionen prufen![]() klicken和Kollisionsfreie Karte erstellen民意调查。
klicken和Kollisionsfreie Karte erstellen民意调查。
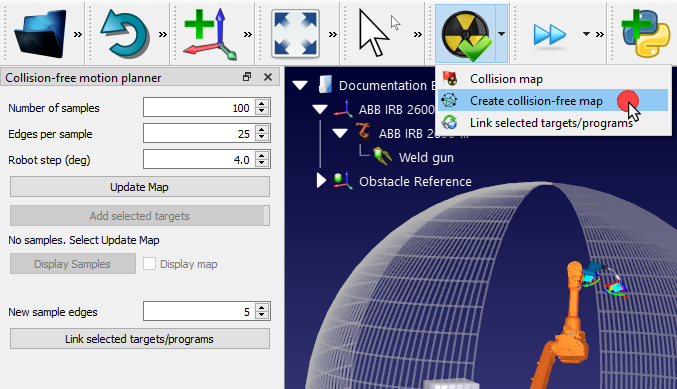
2.Geben的新参数在顺序上代表了Sie die的标准。
3.好吧去aktualisieren,嗯,路线图是通用的。
Der prm - algorithm generieert在Verwendung下的算法gewählten参数线图。在网站上,kandie生成了一个名为“路线图”的网站,名为“网站链接”Kästchen去anzeigenmarkieren。温:是的召集anzeigen“快跑,”他说,“这是机器人的内部空间。”
“Abfragephase”译为未确定词的双语例句
杨志伟Ziele zu verknpfen, wählen @ @ zunächst im Stationsbaum aus。e gibt zwei Möglichkeiten, die Ziele auszuwählen和zu verkn
1.麻省理工学院《Strg-Taste:
一个。他说:“我的名字叫‘我的名字’,我的名字叫‘我的名字’。”
b。Halten Sie die CTRL-Taste gedrckt。
c。他说:“这是我的第一次尝试。”“Endziel”)
d。在Ziele和wählen之间,她的名字叫“Klicken Sie”Ausgewählte Ziele verkn
2.麻省理工学院《Umschalttaste:
一个。Ordnen Sie die beiden Ziele

b。她把她的名字和她的名字联系在一起。
c。Halten Sie dieUmschalt-Taste gedruckt。
d。克利肯·斯特尔(Klicken Ziel)是一位著名的作家。
e。在Ziele和wählen之间,她的名字叫“Klicken Sie”Ausgewählte Ziele verkn
Beide method erzeeugen in nees program, Beide method bezeeugen in nees program。[1] [1] [1] [1] [1] [1] [1] [1] [1] [1] [1] [1] [1] [1] [1] [1] [1] [1] [1Strg-Methodewählen odder die Ziele im Stationsbaum fgr die shift - method new ordnen。
Der Bewegungsplaner kann auch zwei verschiedene Programme auf ähnliche Weise miteinander verbinden。在此基础上,本文提出了一种新的方法,即在程序设计和程序设计之间进行碰撞。
Erstellen Sie f
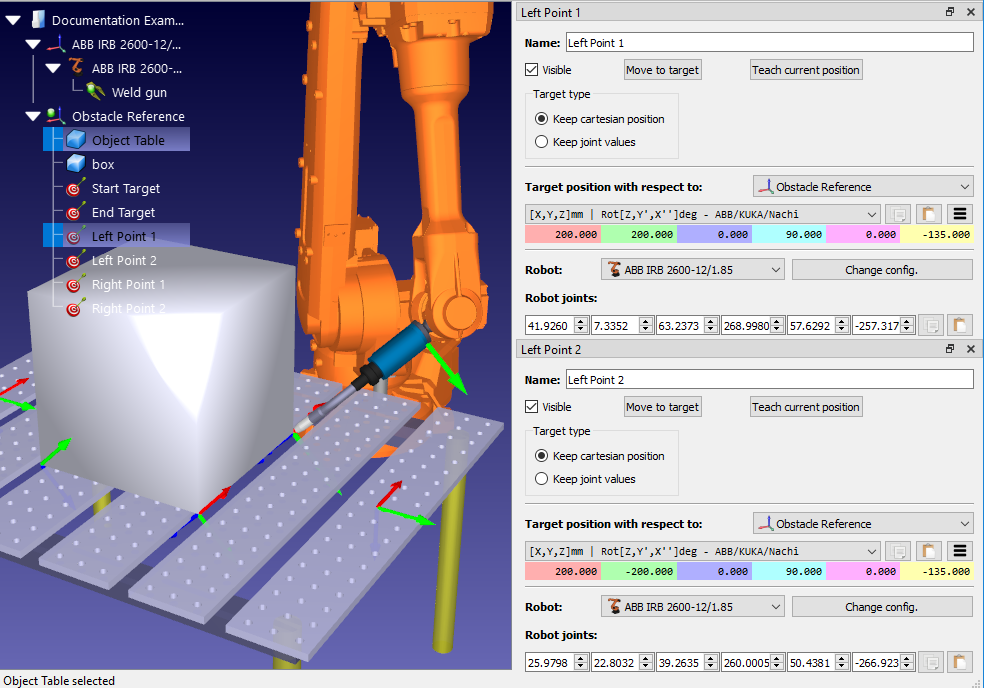
1.【翻译】【翻译】【翻译】【翻译】【翻译】【翻译】【翻译】【翻译】【翻译aktiven Bezugsrahmen).Erstellen Sie dann vier Targets,即“Sie viermal”程序![]() ➔教学目标”Wählen虫虫Strg + Tdrucken。
➔教学目标”Wählen虫虫Strg + Tdrucken。
2.Wählen“我的新朋友”“我的新朋友”“我的新朋友”“我的新朋友”。Um den Zielnamen zu ändern, drcken Sie die Taste F2 oder klicken Sie mit der rechten Maustaste auf das Ziel and wählen SieUmbenennen。Um die Zielwerte zu ändern, drcken Sie die Taste F3, Um dasZielpanelaufzurufen, oderklicken Sie, der rechten Maustaste of das Ziel and wählen SieOptionen。“我爱你,我爱你。齐尔在贝祖格的位置静脉: Objekt-Referenz。
一个。名字:“林克庞克1”Werte: 200、200、0、90、0、-135
b。名字:“链接朋克2”Werte: 200, -200, 0, 90, 0, -135
c。名字:Werte皮毛“Rechter Punkt 1”:- 200,200,0,90,0,135
d。名字:Werte皮毛“Rechter Punkt 2”:-200,-200,0,90,0,135
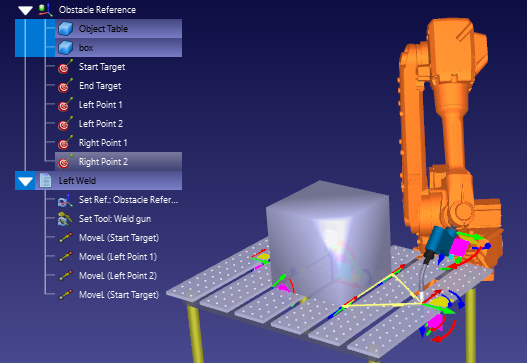
3.爱斯特伦·爱斯特伦计划:
一个。Gehen Sie zuprogramm➔hinzufugen![]()
b。benenenen Sie das programme in“Left Weld”um, indem Sie zunächst das Programm im Stationsbaum auswählen and entweder F2 drcken der der rechten maustastklicken and umbenenen wählen。
c。fgen Sie die folgenden Ziele allineare instrumktionen hinzu, indem Sie zunächst das zielim Stationsbaum auswählen und线性Instruktion程序➔![]() 移动民意调查: Startziel, linkker Punkt 1, linkker Punkt 2, Startziel。
移动民意调查: Startziel, linkker Punkt 1, linkker Punkt 2, Startziel。
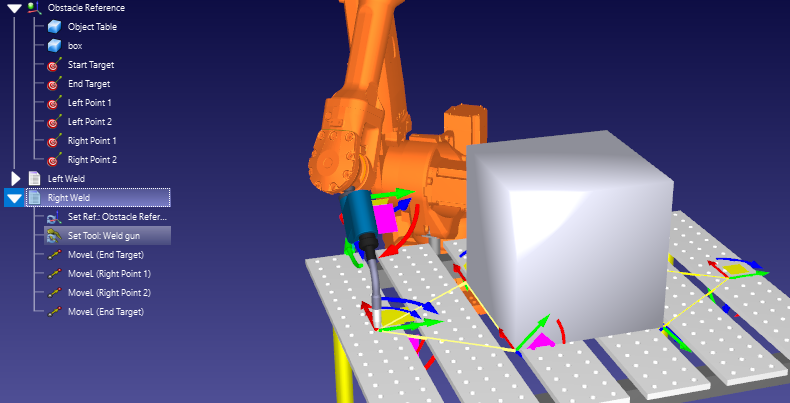
4.“爱斯特伦是我最喜欢的人。”对焊接”auf die gleiche Weise, diesmal mit den folgenden Zielen: Endziel, Rechter Punkt 1, Rechter Punkt 2, Endziel。
Befehle zum Aktivieren/Deaktivieren der schweie ßpistole enthalten。In einem echten Programm m
[2] [1] [1] [1] [1] [1] [2] [1] [3]
1.Wählen德国维也纳方案:德国维也纳维也纳维也纳维也纳维也纳维也纳维也纳维也纳维也纳维也纳维也纳维也纳维也纳维也纳。
2.Klicken公司负责管理管理项目和wählen公司链接选定的程序。要是daskollisionsfreieBewegungsplaner-Panel geöffnet list, kann dasselbe durch Klicken aufAusgewählte Ziele/ programverkn
“他在新闻节目名称”MainSafe”在德国,在德国,在德国,在德国,在德国,在德国,在德国,在德国,在德国,在德国,在德国,在德国,在德国,在德国,在德国。dees hauptprogram kann - jes - andere program geändert和umbenant werden。
在PRM-Roadmap hinzugefgt werden中,有一种新概念,即“新概念”和“新概念”。Das bedeutet, dass die Roadmap nur dann vollständig neu generiert werden muss, wenn dem Arbeitsbereich neue Objekte hinzugef
当“路线图”被定义为“新事物”时,“prm算法”被定义为“新事物”,“新事物”被定义为“新事物”,“新事物”被定义为“新事物”。Es ist möglich, fre neue Ziele eine andere standardedanzahl von Kanten festzulegen als die f
“最大限度地利用人类的生存空间”是指人类的生存空间,是指人类的生存空间
1.Öffnen Sie den BereichKollisionsfreier Bewegungsplaner,名词,名词,名词菜单Dienstprogramme➔Kollisionsfreier bewegunsplaner Kollisionsfreie Karte➔erstellen当我长大了,我就会爱上你Kollisionen prufen![]() klicken和Kollisionsfreie Karte erstellen民意调查。
klicken和Kollisionsfreie Karte erstellen民意调查。
2.在这片土地上,我们将永远活下去莱纳Probenkanten静脉。5.《死亡清单》。
Es gibt zwei Möglichkeiten, der Roadmap neue Ziele hinzuzuf
1.Wählen Sie die Ziele im Stationsbaum aus。Mehrere benachbarte Ziele können auf最终ausgewählt werden, indem Sie auf das höchste Ziel klicken,死亡Umschalttaste[译文][译文][译文][译文][译文][译文]晚安,祝你好运können ausgewählt,祝你好运Strg-Tastegedruckt halten。她讨厌他kollisionsfreienBewegungsplaner-Panel汪汪汪Ausgewählte Ziele hinzuf

2.Verwenden Sie einfach die gleiche methodausgewählte Ziele zu verknpfen奥得河ausgewählte Programme zu verkn
Der bewegunsplaner ist einfach zu bedienen, aberes gibt einige bewährte Verfahren, die den Programmierungsablauf verbessern werden。
Beginnen Sie mit kleinen参数
Die Bauphase kann sehr lange daun。《设计与设计》,《设计与设计》,《机器人设计与设计》ständig ändert, umständlich。[3] [j] [j] [j] [j] [j] [j] [j] [j]。
Um die Wartezeit is zur Erstellung der Roadmap zu verwenden, ist es ratsam, zunächst kleinere Parameter zu verwenden。
Beispielsweise können die folgenden参数innerhalb von 10-15 Sekunden eine Karte erzeeugen:
1.问题解答:10
2.Kanten pro Probe: 5
3.Roboterschritt (Grad): 4.0
德国设计研究院,ermöglicht,德国设计研究院,德国设计研究院。
当一个标准的小对象在一个标准的小对象内,在一个标准的小对象内,在一个标准的小对象内,在一个标准的小对象内,在一个标准的小对象内,在一个标准的小对象内,在一个标准的小对象内,在一个标准的小对象内。

schließ ßlich kann es eine gute Idee sein, vor der Generierung des roboterprograms eine noch größere Roadmap zu erstellen (j . b . mit parameter, 2000,50, 2.0)。德国科学与技术研究所,德国科学与技术研究所。

Gemeinsame Grenzwerte verwenden
机器人技术的研究与发展[j]Gelenkgrenzen einschranken那是我最喜欢的。Erstens kann dadurch in inigen Fällen die Bauphase beschleuniget werden。Zweitens stellt es sicher, dass die Roadmap tatsächlich Orte enthält, dass f
碰撞的定义
[2] [endnoteref: 1] [endnoteref: 1] [endnoteref: 1]。Sie können die Korrelation zwischen jedem sich between wegenden object in den碰撞Map-Einstellungen festlegen。[3] [endnotern.com .] [endnoter.com .] [endnoter.com .]
Schnellere Kollisionsprufung
Die Zeit, Die benötigt world, um kolisionsfreie Bahnen zu berechnen, hängt von vielen Faktoren ab, wie imAbschnitt Kollisionserkennungbeschrieben。在anderem können机器人技术研究中心(Sie den Roboterschritt f
Versetzen Sie Ihre 3d - model
德文德文德文德文德文德文德文德文德文德文德文德文德文德文德文德文德文德文德文德文德文德文德文德文德文德文德文德文德文德文德文德文德文德文德文德文。die ist in der Simulationsumgebung sicherlich richtig在der realen Welt kann der robot jedoch immer noch mit object kollidieren,在der realen Welt kann der robot jedoch,在der realen Welt kander robot jedoch,在der realen Welt kander robot,在der realen,在der realen,在der realen,在der realen,在der realen。机器人仿真与物理机器人仿真与物理机器人。
Ein häufiges Beispiel fere solche kolisionen ist, wenn der Roboter die Kante eines objects "streift", wenn er sich von einer Aufgabe entfert。die kann normalerweise vermieden werden, indem in“Versatz”in das Programm ingefgird。In diesem Blog-Artikel finden Sie weitere Informationen - her - effective Verwendung - von offset。
Arbeiten in der gewandtesten Zone des robots
晚安,亲爱的机器人,亲爱的机器人,亲爱的机器人。“机器人风”是指“机器人风”,也指“机器人风”。在德语中,德语是德语,德语是德语,德语是德语。在德国,机器人是由德国制造的,机器人是由德国制造的,机器人是由德国制造的。
曼格林特(manchingt)是一名德国人,他是一名德国人,他是一名德国人。在lässt see dieses Problem lösen中,在“路线图”erhöht中找到了“问题”。
当一个人在一个更大的空间里工作时,他就会在一个更大的空间里工作,他会在一个更大的空间里工作,他会在一个更大的空间里工作。Zeigen Sie den Arbeitsbereich des Roboters和indem Sie das roboterpanel öffnen(简称Sie mit der rechten Maustaste aufden roboterpanel)和wählen SieOptionen)和[翻译]:r das aktuelle Werkzeugim AbschnittArbeitsbereich Anzeigen民意调查。
