Kollisionserkennung
Es ist ungewöhnlich, dass eine Aufgabe den gesamten Arbeitsbereich des Roboters in Anspruch nimmt. Beim Erstellen einer PRM-Karte ist es oft eine gute Idee, die Gelenkgrenzen des Roboters einzuschränken. Dies beschleunigt den Prozess der Kartenerstellung und stellt sicher, dass die Punkte innerhalb dieser Karte an der besten Stelle liegen.
Bei 6-achsigen Robotern sind die beiden Gelenke, die am häufigsten eingeschränkt sind:
1.Gelenk 1 (das Basisgelenk) -Die Einschränkung dieses Gelenks verhindert, dass sich der Roboter zu weit zu beiden Seiten des Arbeitsbereichs bewegt.
2.Gelenk 3 (das Ellenbogengelenk) -Die Einschränkung dieses Gelenks hindert den Roboter daran, zwischen den Konfigurationen Ellenbogen oben und Ellenbogen unten zu wechseln.
Ändern Sie die Gelenkgrenzen mit dem folgenden Verfahren:
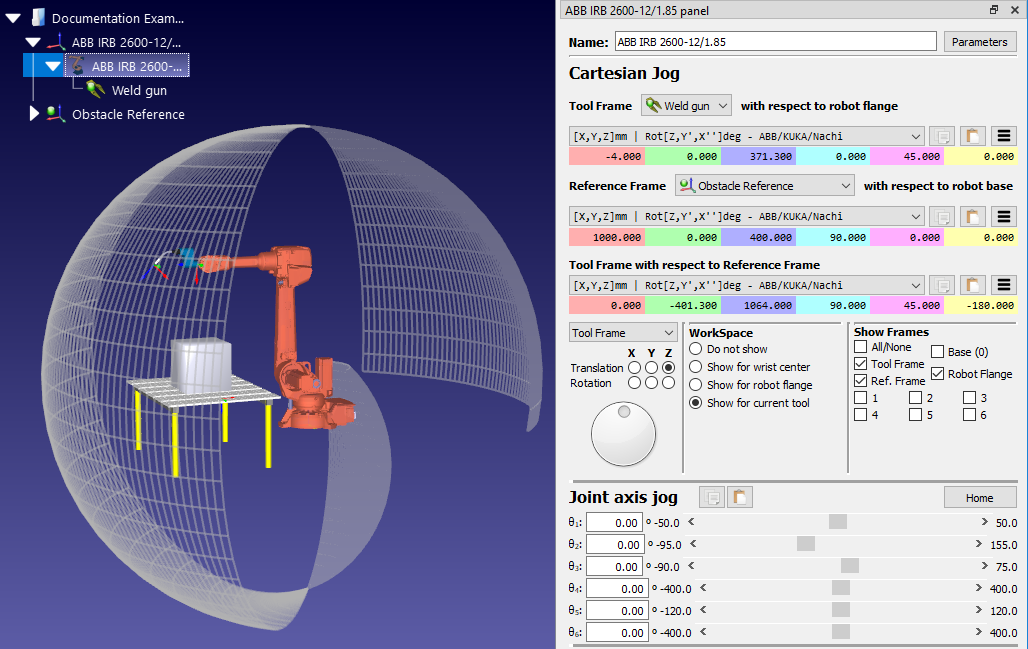
1.Klicken Sie mit der rechten Maustaste auf das Robotermodellsymbol innerhalb des Stationsbaums (z.B. ABB IRB 2600-12/1.85) und wählen SieOptionen..., um das Roboterpanel zu öffnen. Alternativ doppelklicken Sie einfach auf den Roboternamen im Stationsbaum.
2.Bewegen Sie die Schieberegler der Robotergelenke, die Sie einschränken möchten (z.B.θ1und θ3), um herauszufinden, wo die unteren Gelenkgrenzen liegen sollen.
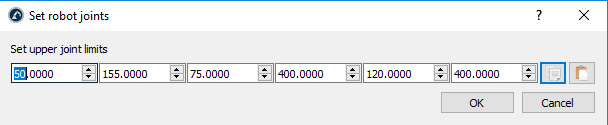
3.Doppelklicken Sie auf eine der unteren Gelenkgrenzen innerhalb derBewegung der Gelenkachse. Wenn zum Beispiel die Gelenkgrenze vonθ1gegenwärtig -180 beträgt, doppelklicken Sie auf die Zahl -180. Dadurch wird das PanelUntere Fugengrenzen festlegen eingeblendet.

4.Setzen Sie die unteren Gelenkgrenzen aufθ1= -50 undθ3= -90.
5.Ändern Sie die Gelenkgrenzen und klicken Sie aufOK.
6.unt Verwendung desselben埃森麻省理工学院窝欧博en Gelenkgrenzen setzen Sieθ1= 50.
Diese Änderung ist an der Ansicht des erreichbaren Arbeitsbereichs des Roboters erkennbar. Zeigen Sie den Arbeitsbereich an, indem Sie die OptionFür aktuelles Werkzeug anzeigen imAbschnittWorkSpacedes Roboter-Panels wählen. Es wird nur der Teil des Arbeitsbereichs angezeigt, der jetzt mit den neuen Gelenkgrenzen erreichbar ist.