
How can you tell if a robot will suit the space needs of your task before you buy it?
Even when you’ve narrowed down your selection by all the usual specifications and metrics, you might still have some nagging doubts.
Will the robot be so big that it doesn’t fit into the space that you have available for it?
If you go with a smaller robot, will it be able to reach all of the areas you need it to for the task?
Is there a way to optimize the size of the robot to be most efficient?
之前你购买一个特定的机器人,很难to tell what it will be like to have it in your facility beside you. You can watch all the YouTube videos you like, read all of the datasheets, and even look at other robots in other people’s facilities…
Without seeing how the robot will fit within your specific task, it can sometimes end up as a bit of a guessing game. You make as many calculations as you can, then you just hope.
Or you choose to be overly conservative and give up huge amounts of floor space to a robot that doesn’t need it.
Perhaps you’ve already gone through ourGuide to Choosing a Robot for Manufacturing.
You’ve identified what type of robot you need, which end effector, and which accessories. You’ve narrowed down your options to a selection of robots based on their payload and repeatability. Andyou’ve used our toolsto select a reach that seems more or less reasonable.
But, you’re still not able to visualize the full space that each robot will occupy.
Why It’s Hard to Imagine the Space a Robot Will Take Up
The problem with robots is that they are so dynamic.
With a CNC machine, for example, you can walk up to a machine in a trade show and see exactly how much space it will take up on your workfloor. The full size of the machine is simple to calculate — it’s basically a large cuboid.
With a robot, the space it takes up is not so simple. As well as the physical dimensions of the robot itself, it also occupies an extended space containing all of the locations that the robot’s end effector will reach when the robot is moving. This is known as the robot’s “workspace.”
Most 6 DoF industrial robots have a workspace that is somewhat like a sphere. Delta robots have a complex workspace that looks like a 3-dimensional arc. SCARA robots have a cylindrical workspace.
It’s hard to tell just by looking at a robot what its workspace will look like.

How can you ensure that the robot you are considering will have a workspace that suits your needs?
Workspace Visualization Helps You Make a Better Decision
Thankfully, there is a way that you can easily see the robot’s workspace and find out how it will affect your specific task.
And you can do this before you even choose which robot you want to purchase.
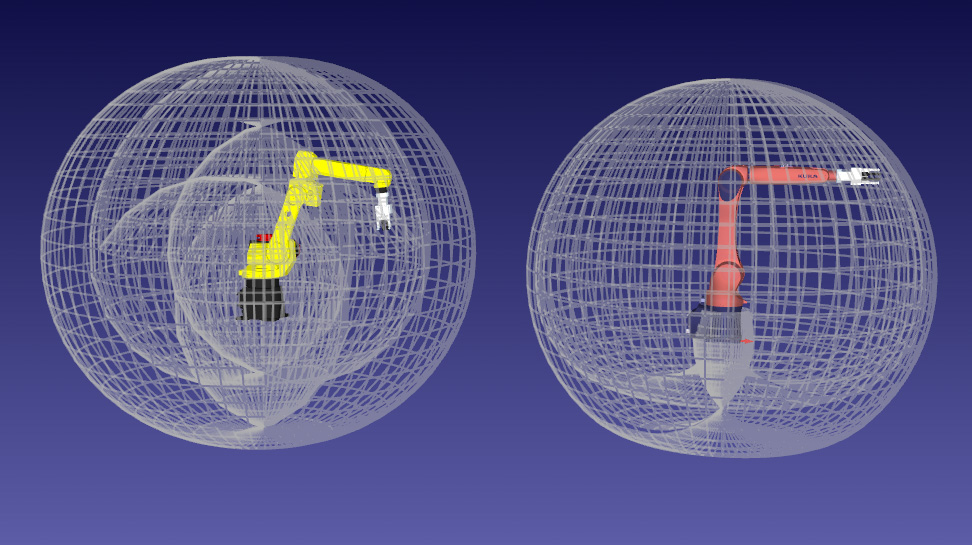
Workspace visualization is a tool that allows you to visualize the outer limits of a robot’s workspace as a 3D shape. In RoboDK, this space is shown as a grey outline that is placed around the simulated model of the robot.
You can use this feature to inform your decision about which robot is the best for your task.
By creating a virtual mock-up of your application, you can quickly switch between different robot models (without having to program the task itself) and use the workspace visualization feature to see if each specific robot will be the best one to suit your needs.
Once you have found a robot that fits the task — based on its workspace — you can then program the application into the simulator to ensure that your chosen robot really will be able to do the job.
How Workspace Visualization Works
When you look at the datasheet of a robot, you will normally see a basic pictorial representation of that robot’s workspace. Usually, this consists of one view from the side and one from the top of the robot.
Such pictures are helpful, but not helpful enough.
A workspace visualization is basically a 3D version of such pictures. It is produced by algorithmically moving all of the robot’s joints through all of the possible positions and mapping the resulting position of the end effector into a 3D shape.
As the calculation is done in 3D, it gives you a much more holistic perspective on the capabilities of a particular robot than you would have if you just looked at the robot’s datasheet.
The Impact of Adding an End Effector
Changes that you make to the robot will sometimes also affect its workspace. For example, when you add an end effector, the dimensions of that end effector will change the size and sometimes also the shape of the workspace. In RoboDK, you can choose to see the workspace of the robot with and without its end effector.
Whenever you add an end effector to your robot, it is good practice to use the workspace visualization feature to see how it will impact the robot’s workspace.
How to Get Started Using Workspace Visualization
With RoboDK, it’s very easy to use workspace visualization to help you in your robot purchasing decisions.
Here are the steps to view the workspace of any particular robot:
- Load the robot model in RoboDK from our extensive2022世界杯南美区预选赛 .
- Open the robot’s properties panel by right-clicking on it in the program tree.
- Go to the section labeled WorkSpace and choose either to view the workspace of the robot itself (from its flange) or with the current tool attached.
- You will now see the workspace of the robot visualized around the robot itself.
Of course, you are not restricted to only viewing one robot’s workspace at a time. You can load multiple robots into the simulation and compare their workspaces side-by-side.
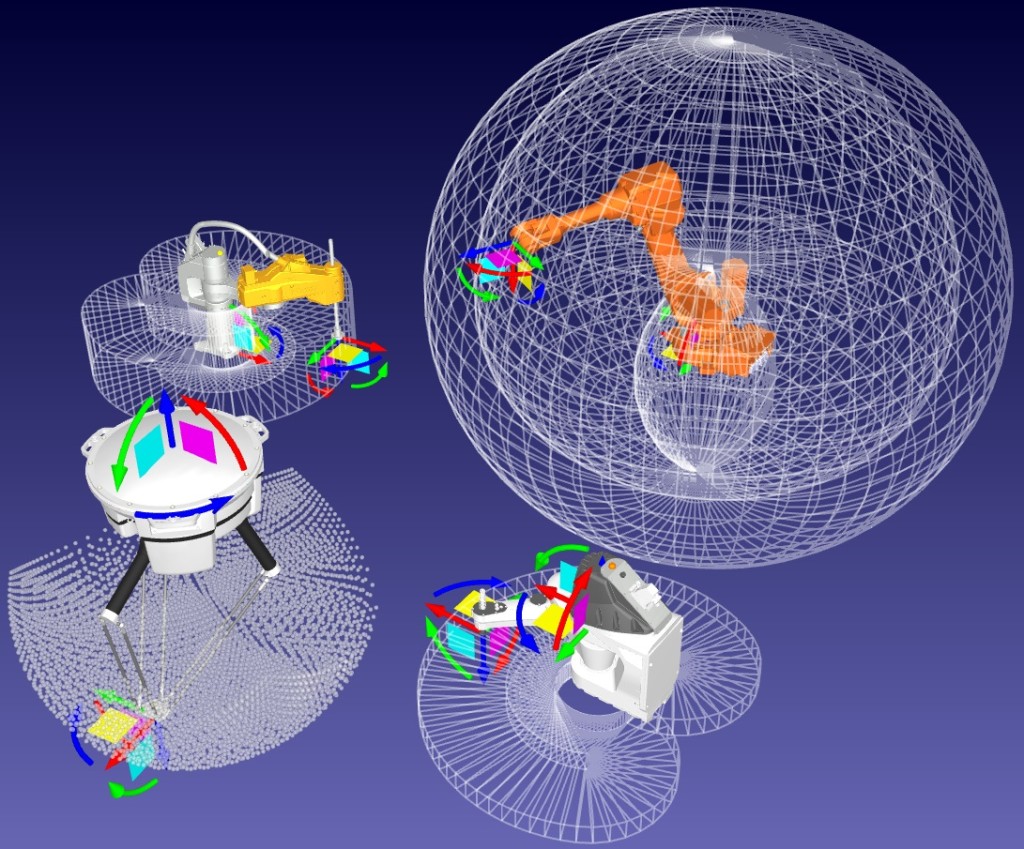
This can be useful when you are trying to decide between two different robot models. But, it can also be helpful when you are using multiple robots on a single task and you want to find out how their workspaces might interact and overlap.
How could workspace visualization help your robot deployment?Tell us in the comments below or join the discussion onLinkedIn,Twitter,Facebook,Instagram,or inRoboDK论坛.



Robot has the basic characteristics of perception, decision-making and execution. It can assist or even replace human beings to complete dangerous, heavy and complex work, improve work efficiency and quality, serve human life, and expand or extend the scope of human activities and capabilities.